





◆ラップタイマを作る

今回は速くて正確なライントレースロボットを作りたいので、 ロボットが走る時間を確認したいと思います。コースを1周する時間を「ラップタイム」といいます。
ラップタイムを測るための装置「ラップタイマ」を作ってみました。ストップウォッチ片手に手動で測ることもできますが、何度も測定すると大変なので、自動化しておきましょう。 仕組みは単純です。インテリジェントブロックNXTまたはEV3のポート4に超音波センサーをつなぐだけです。 筆者の場合は余分に持っていたNXTを使いました。もしEV3を2つ以上持っている場合にはそちらを使ってください。
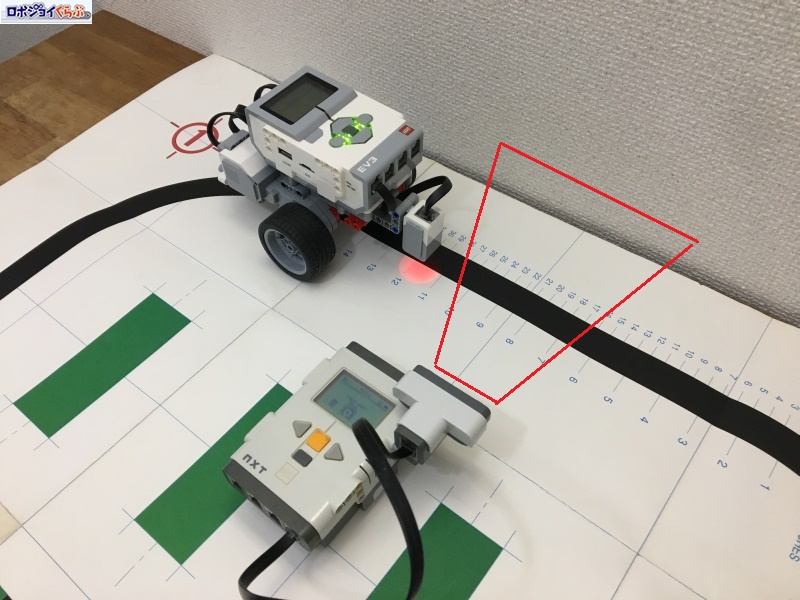
超音波センサーは進行方向に対して、横向きに設置します。 ここがスタート/ゴールとなります。超音波センサーの前方20cm手前までには何もない状態にしておきます。 前方にロボットが通過すると、センサーが反応します。
超音波センサーは横方向に反応する範囲がはっきりしていません。 そのため、通過時のタイミングにはズレが生じます。しかし、 今回の場合、1周目と2周目の通過時のタイミングが同じだけズレますので、1周あたりの時間を正確に求めることができるはずです。
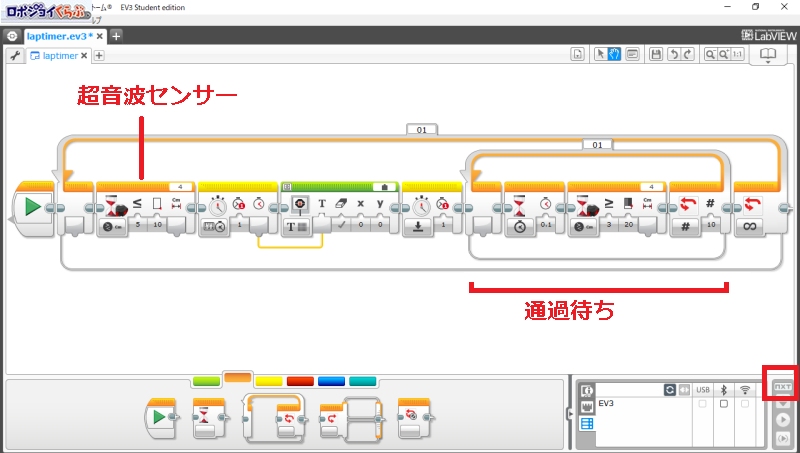
ラップタイマーのプログラムです。 EV3ソフトウェアはNXTとEV3のどちらでもプログラムが作れるように工夫されています。 ただし、NXTの場合は使える機能が機能されています。 プログラムの仕組みは次のとおりです。
・超音波センサーが10cm以下になるまで待つ。
・タイマーで測定した時間を表示。
・タイマーをリセットする。
・20cm以上になるまで待つ。以上の処理を繰り返す。
センサー通過時に連続して反応してしまわないように「20cm以上」の待つ処理を念入りに行っています。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。