





◆トレースのしくみ
ここからが本題です。ライントレースのプログラムを考えます。
方法はいくつかありますが、今回は床面の色が「白」か「黒」かの2値だけを判断してトレースを行うことにします。
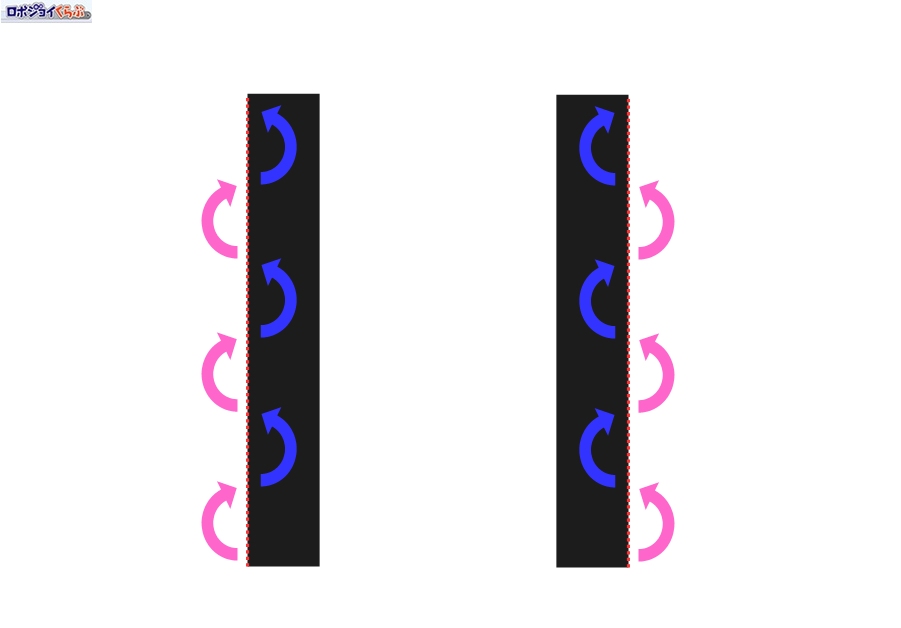
ラインをトレースするさいには「白」と「黒」の境界を走ります。図のように境界の右側か左側かのどちらか一方になります。今回は図の右側の方法を採用します。
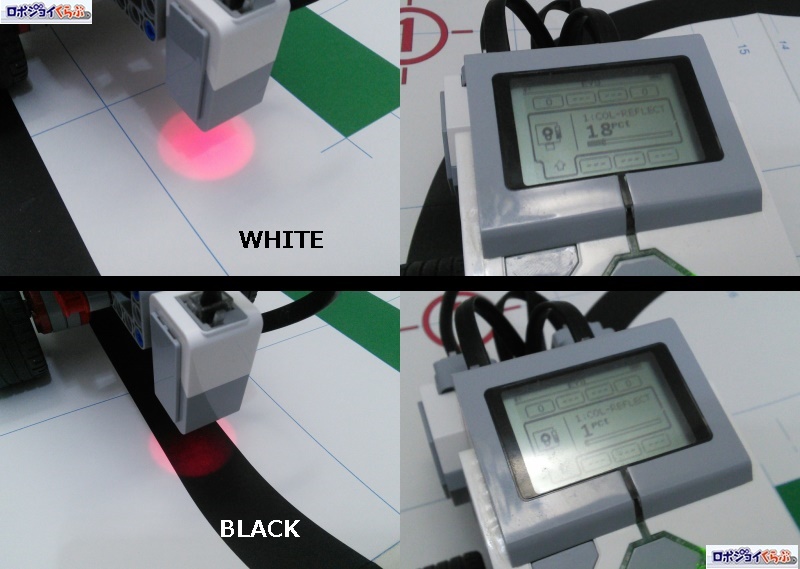
EV3カラーセンサーの特性を確認します。 インテリジェントブロックの「View」を使って「反射光の強さ」を測定します。結果は次のとおりでした。
床面が白色の場合は「18」。
床面が黒色の場合は「1」。
ちなみにこの値はセンサーの取り付け位置によって変わります。今回の場合はセンサーと床面とのきょりがありすぎて、値が小さくなってしまっています。

今度はライトの光が白/黒で半々の状態にして測定します。 結果は「9」でした。白=18、黒=1なので、その平均値に近いです。
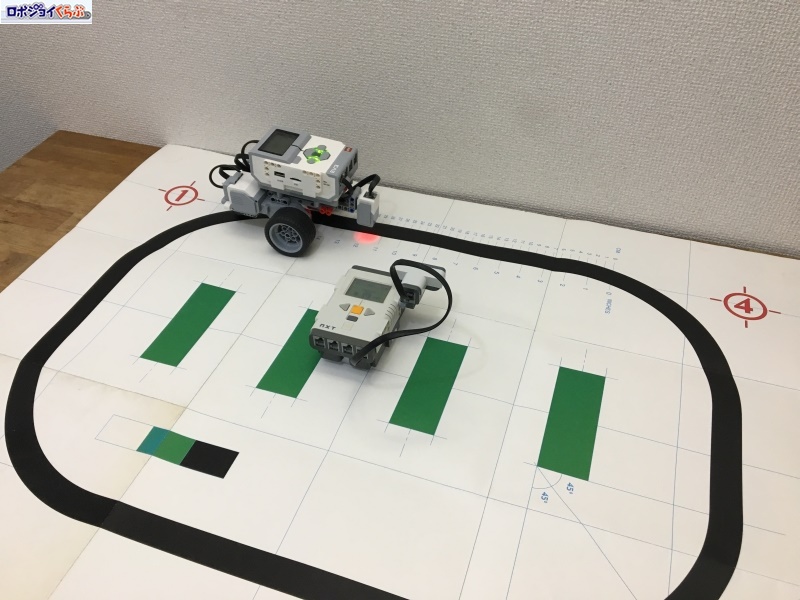
ロボットを設置した様子です。
ラインのやや右側にロボットを置きます。ロボットから見ると、やや左側にラインがある状態です。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。