




"Line trace robot" is follow-up (trace) of the robot line (line) in the floor. Since these robots have the basic control of "input" and "output" are jammed (and really deep) in the world of robot competitions has become a staple element. I think in this corner, I want to convey the fun of that "LEGO Mindstorms NXT for Education (hereinafter, NXT)" to create a line trace robot that you can control. (Takuya Matsubara)
create a compatible machine of "three wheeled robot"
The "line trace robot" of NXT, the most familiar type is tricycle robot. (I do not know the name of the official, referred to as "three-wheeled robot" in this case). Three-wheeled robot has been introduced to in the first documentation that came with the retail and education. This three-wheeled robot is composed of two motors with a single light sensor. It comes with the one tire for each motor, the third tire in the back is turned to the caster.
The structure of the robot, left and right motor connected to output port B and C, the light sensor is connected to the input port 3.
This time I will try to make a "compatible" with the same motor and a sensor connected to the "three-wheeled robot."
The reason why I make compatible machine, have the same hardware as much as possible and we want to use the same software.
After, three-wheeled robot need to use many number of parts and assembling is a little cumbersome. So I think, compatible machine is easy to make and would like to reduce the parts.

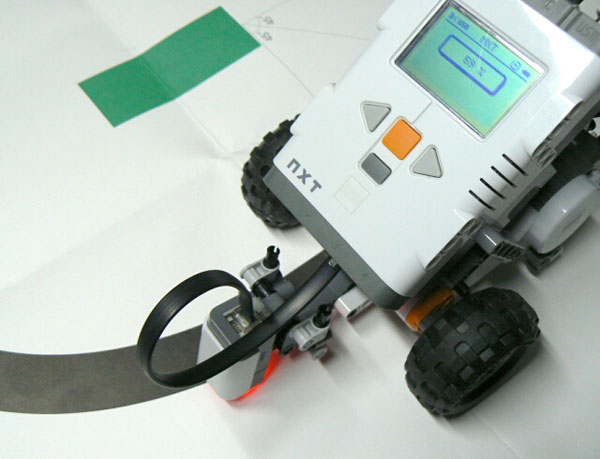
Here is the three-wheeled robot-compatible hardware. We reduced the number of components as much as possible.

It is a state as seen from behind.

It is a state seen from the back side. Pulley has become the caster.











Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.