




See the actual measurement
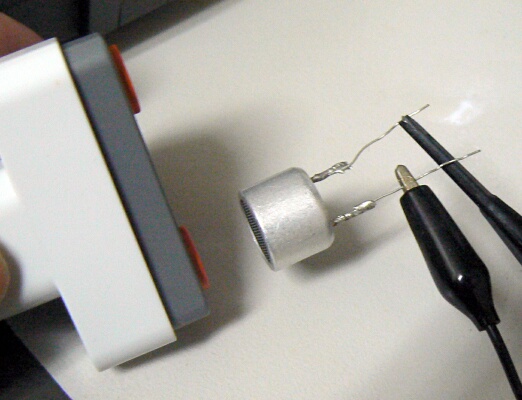
I would like to measure the ultrasonic using the devices called "oscilloscope". Measure the voltage of both terminals of the receiver (Voltage). Select the "VIEW-Ultrasonic" in the menu of NXT, to operate the ultrasonic sensor. First, we rely on the receiver to the left as seen from the front.
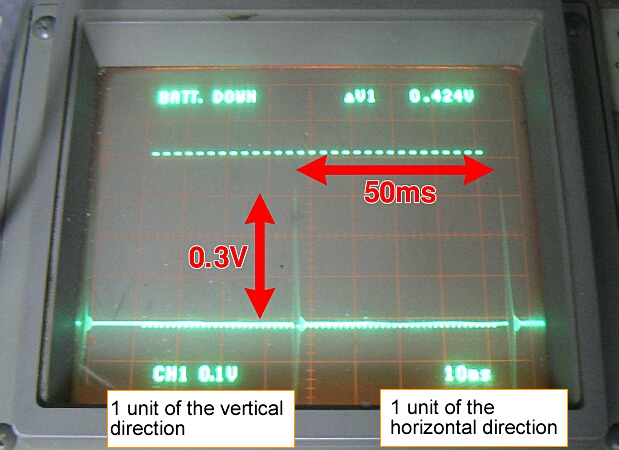
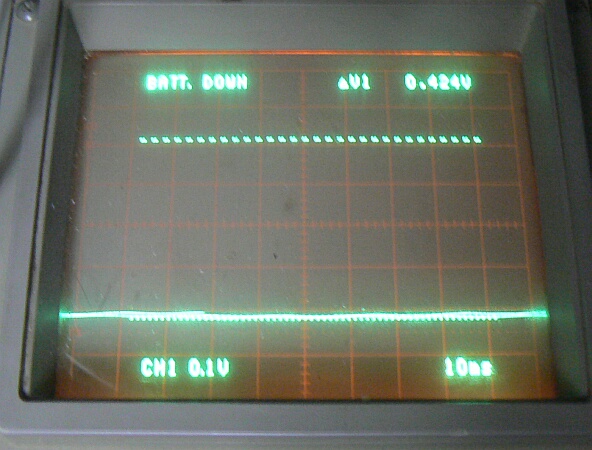
Measurement result is shown in the photograph.
First, the view of the oscilloscope, the horizontal direction is time axis, the vertical direction is the axis of voltage. Looking at the screen, you can see that spine-like waveform comes from a period of 50ms. ms (milliseconds) is the second 1/1000. The unit is about the amplitude of the waveform is ± 0.3V. This voltage is ultrasonic reflect to the receiver, is that caused by the piezoelectric effect.
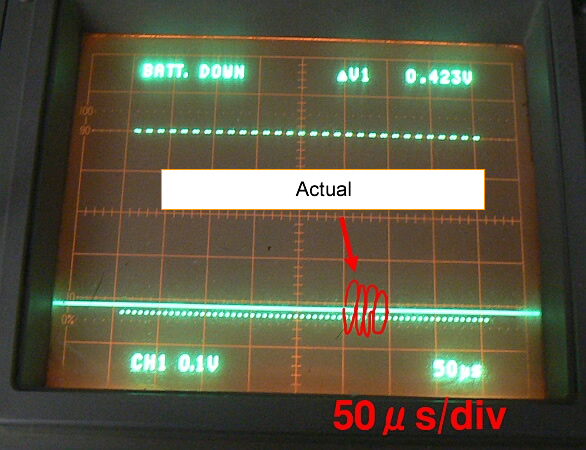
I will continue to expand this spine-like waveform. The photograph you could not see well, but I could see further fine waveform in the waveform. Time per one cycle of the waveform is 25μs. This is the ultrasound.
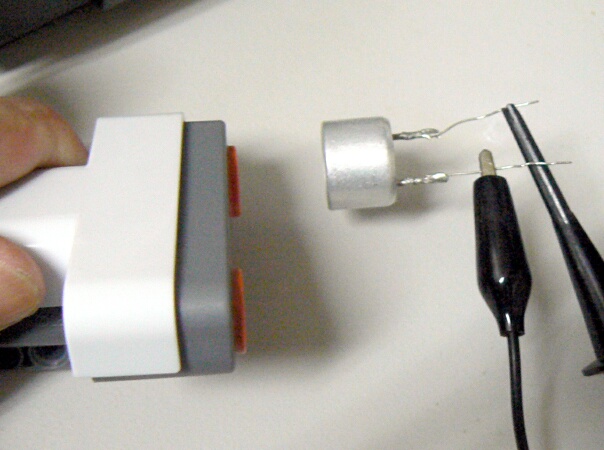
It is showing the receiver of the right side.
Then, have become the voltage 0V. This state is not detecting an ultrasonic wave.
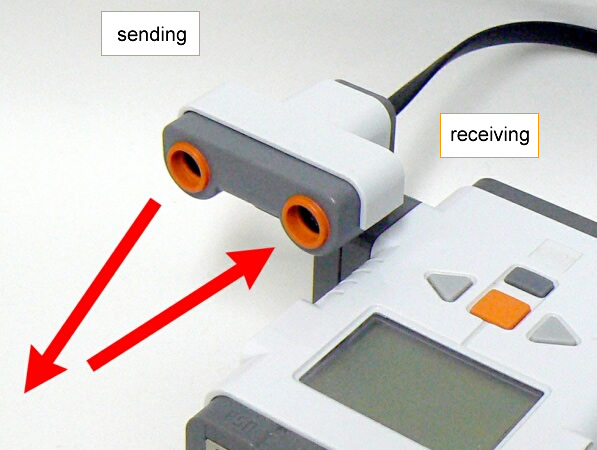
So, when viewed from the front of an ultrasonic sensor, the left side of ultrasonic is the sending, right side will be that the receiving side.
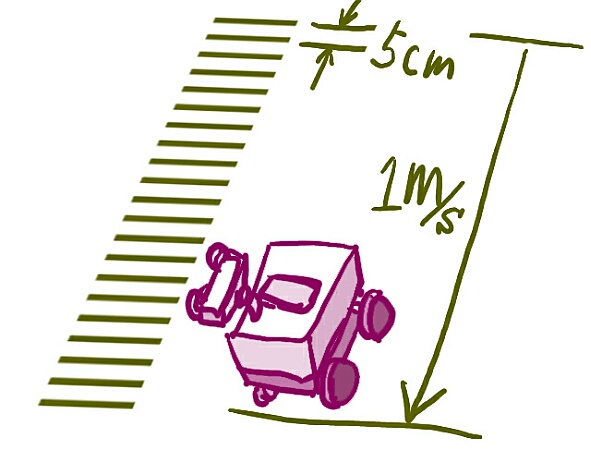
That ultrasound has come out from 50ms period is that the distance could not be measured only up to 20 times per second. For example, there was a robot on the move in the distance of 1m per one second, ultrasonic sensor only measures the distance at intervals of 5cm. If you really want to measure the distance of each 1cm, the robot must crawl 20cm per second. Will be "when the robot is moving at high speed, use of the ultrasonic sensor is not suitable"











Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.