




- Page:1
- 2
Well, why did the machine only have one wheel?
I will explain the reasons.
First, pay attention in the photo below.
And try turning a car like this.
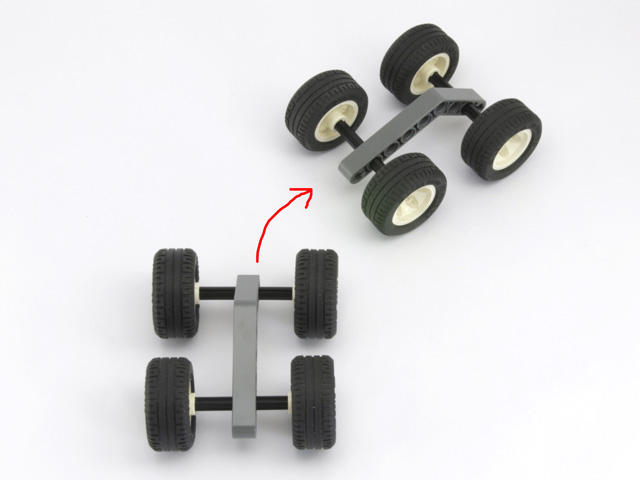
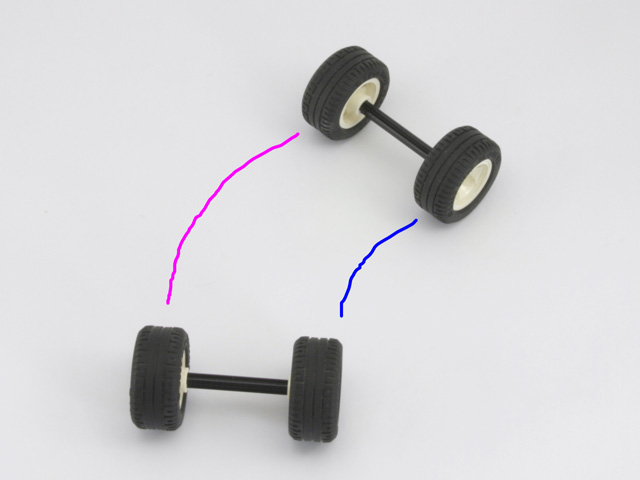
Remove the rear wheel section; let's take a look at its movement.
When the robot is turning, the tire will be on the outside, will run the length of the purple line.
On the other hand, the inner tire will be running the length of the blue line.
It'll run the length is obviously different.
Diameter of the tire will be the same, but the amount that the tire rotates at the inner and outer is different.
Well, if we put the tires to the motor as shown in the picture below.
Two tires are connected by the same shaft and tire rotation will be the same amount.
When it runs straight, it is no problem at all. But, if you try to turn, it would be a problem.
If the amount of inner and outer tire does rotate exactly same, the both tire’s running length will be the same too.
This is no way to turn. Change the direction in the front wheel, you make it turn forcibly, outside or inside tire will be slipped, the robot becomes very inefficient.

In order to solve this problem I did put only "a wheel".
If only one wheel does not occur "outside, inside" problem, then it will turn smoothly.
But become a three-wheeled car with the front and rear wheels, the body balance will be very unstable.
If you try to turn at high speed, they will be overturned.
When you try to make two-wheel rear wheel, we use what's called "differential gear".
Unfortunately, the basic set of MINDSTORMS NXT is not included.
But that comes with an extended parts set for education.

This gear, a little cool right!
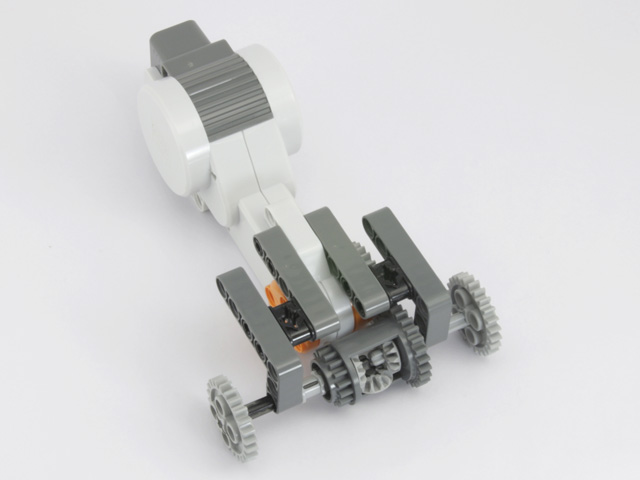
Let's experiment with this gear. I want you to make something like in the photo below.



Well done?
Then connect this motor to NXT intelligent block, make a transfer program the motor continues to rotate.
Power and direction are up to you.
Place the machine in this direction, RUN the program. When the motor started it is the beginning of the experiment.
Think 24 teeth gears of the left and right are attached as tires.

Do not do anything
The left and right tires, it has been running the same speed.
It's a state when the car is straight ahead.
Try to stop the both tires
By stopping both sides of the tire by hand, verify the stop the rotation or not.
You will find out that tires stop, but not both at the same time.
When you stop one tire
Now, hold the tire on the right side only, try to stop the rotation.
You should see the right tire and stops, and it will speed up the rotation of the left tire.
The speed has been doubled. When I stopped the tire on the left, let you confirm that the same movement.
If you slow the speed of one tire
Now, try to slow down the speed gently to touch the tire on the right side, but do not stop completely.
The amount of decrease the speed of rotation of the right, the left rotation should be faster.
Actually, this is the moment called "the amount of rotation of left and right are not same =the length of the left and right tires run different", the state when the robot is making turn.
Differential gear is referred to "divide the rotation of the motor to the left and right tires".
Now a day the most of cars running around you contain this differential gear.
(The cars without turning the curve are in big trouble though.)
Do you understand the role of differential gear?
This is it for this time.
Next month, let's make a car with the differential gear.
- Page:1
- 2











Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.