





- Page:
- 1
- 2
ここでは、TETRIXを使ってロボット競技会に出場した、福井県立武生工業高校ロボット工学部の活動を通して、TETRIXの活用事例を紹介していきます。
◆はじめに
私たち武生工業高校ロボット工学部は、毎年全国高等学校ロボット競技大会に出場しています。
そこで今回私たちはTETRIXを使って競技に挑戦しました。
まず今年のルールを説明します。
競技は、真珠で有名な三重県の英虞湾に見立てたコースで、リモコン型ロボットと船に見立てた自律型ロボット(以降、船ロボットと呼びます)を使って行います。
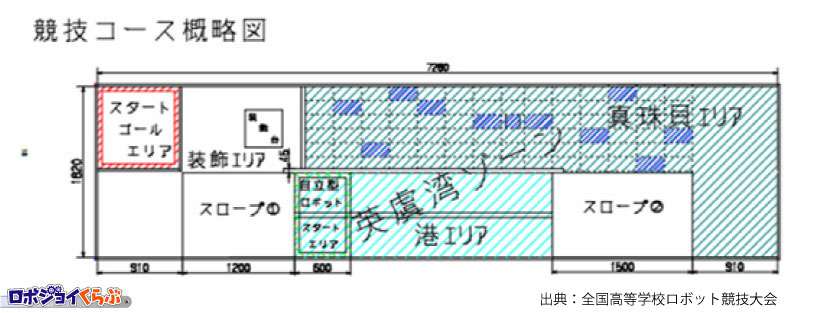
リモコン型ロボットは「スタートゴールエリア」から出発し、真珠をとるため「真珠貝エリア」を目指します。
途中、「スロープ①」をのぼると「港エリア」があります。
ここで船ロボットが待ち構え、リモコン型ロボットを上に乗せ「スロープ②」まで移動します。
「真珠貝エリア」で真珠をとったリモコン型ロボットは、「スロープ②」をのぼり、また船ロボットの上に乗り「港エリア」を移動します。
「スロープ①」を下り、「装飾エリア」に真珠を飾り、「スタートゴールエリア」に戻ればゴールです。

実際のコースはこのようになっています。
この競技で使用する船ロボットは、プログラムによる自走式のロボットでなければならないため、私たちはTETRIXとマインドストームを用いて製作することを考えました。
TETRIXとマインドストームを使用する理由としては、以下のようなことが挙げられます。
(1) ロボット工学部では、レゴ マインドストームを使用したロボット競技(WRO)に参加しているので、マインドストームのプログラムに慣れている。
→ EV3を利用することも可能ですが、今回はよりプログラムに慣れているNXTを使用することにしました。
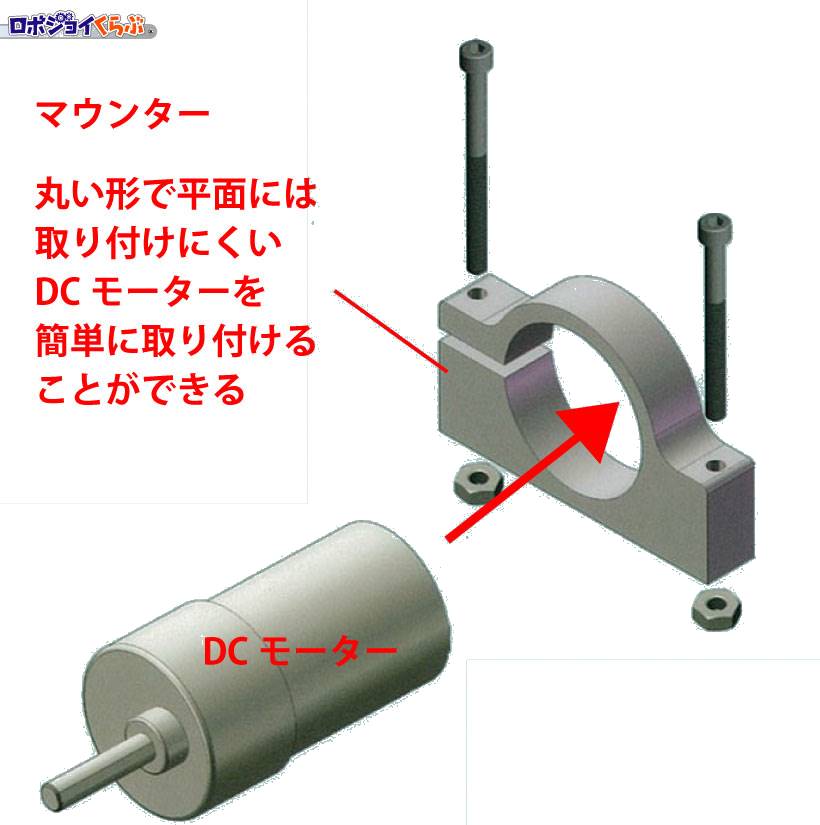
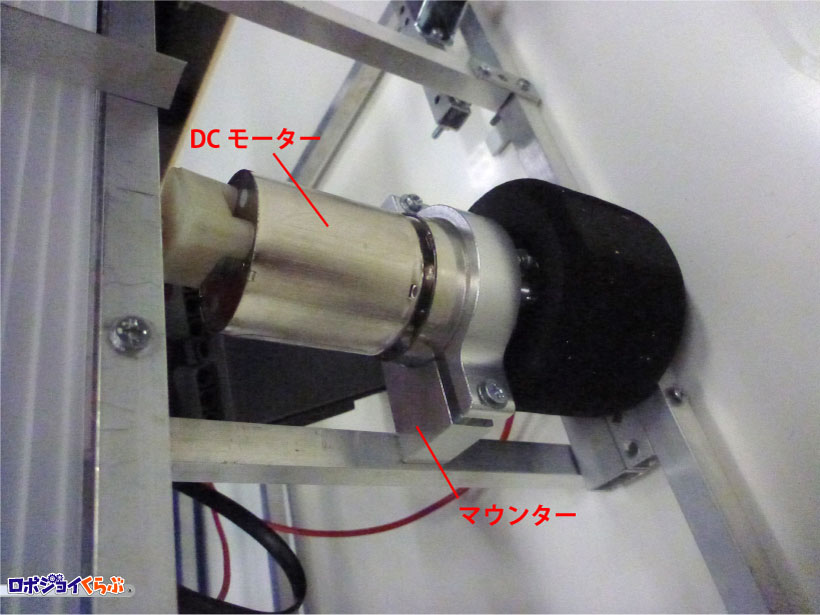
(2) TETRIXの部品とアルミの材料を結合するパーツが揃っている。
→ DCモーターのように、板状のアルミの材料に結合しにくい形の部品も、マウンターが用意されているため簡単に結合できる。
(3) 大型のロボットを作ることができる強力なDCモーターや、正確に動作するサーボモーター、大きなタイヤが揃っている。
このような利点を活かして、私たちはTETRIXとNXTで船ロボットを製作することにしました。
- Page:
- 1
- 2


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。