





◆前進して元の場所に戻るプログラム
今度は、前進してから180度せん回して元の場所に戻るプログラムを作ってみました。先ほどのプログラムの応用です。
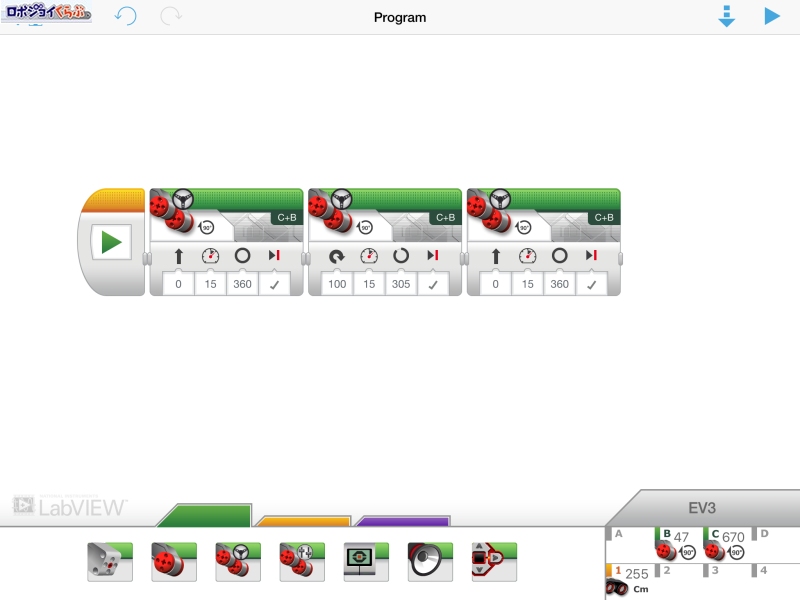
ステアリングのブロックが3つ並んでいます。2つ目のブロックはせん回するための動作を行っています。 ステアリングの値を-100または100にすると、その場せん回をします。回転する角度を305度としていますが、これは左右のタイヤ間の距離(95mm)とタイヤの直径(56mm)から求めた値です。具体的には180度×95mm÷56mm=約305度という計算をしています。
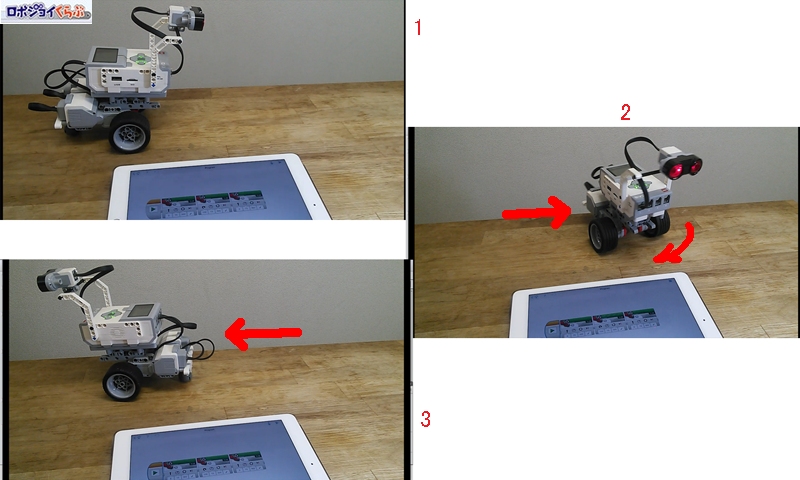
実行すると、このように動きます。
ステアリングの値を「100」にしたため、時計回りにせん回しました。「-100」にすると、反時計回りにせん回します。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。