





◆スライダ・クランク機構の仕組み
2つ目のテーマはスライダ・クランク機構です。
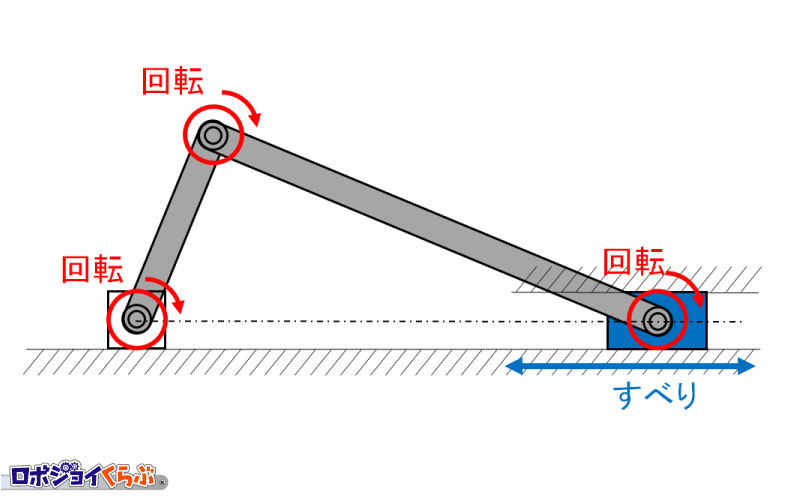
スライダ・クランク機構とは、3つの回転部と1つのすべり部によって成り立ちます。
スライダ・クランク機構には,4種類あります。
①往復スライダ・クランク機構(左図)
②回転スライダ・クランク機構
③揺動スライダ・クランク機構
④固定スライダ・クランク機構
ここでは、一般的な往復スライダ・クランク機構について説明し、他の機構については簡単に説明します。

①往復スライダ・クランク機構とは
クランク(回転するリンク)の回転運動をスライダの往復直線運動に変える機構です。
逆に往復直線運動を回転運動に変えることもできます。
クランクを1回転させることでリンクによってつながれたスライダが1往復します。
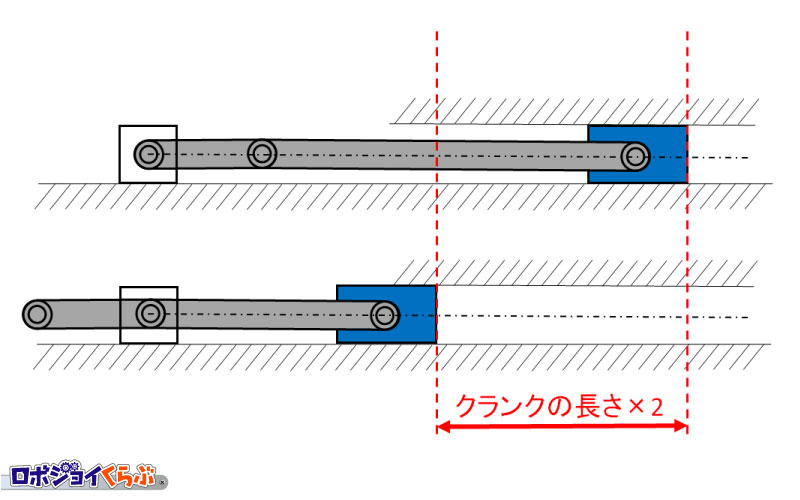
クランクを1回転させるためには、
リンクAの長さ < リンクBの長さ
でなければなりません。
また、スライダが移動する距離は、クランクの長さの2倍になります。
この仕組みは自動車のエンジンや蒸気機関車の動輪に使われています。
②回転スライダ・クランク機構とは
リンクABを固定し、スライダの運動によりACの長さが伸び縮みすると、リンクBCがBを中心に回転します。
これは、パワーショベルのアームに使われています。
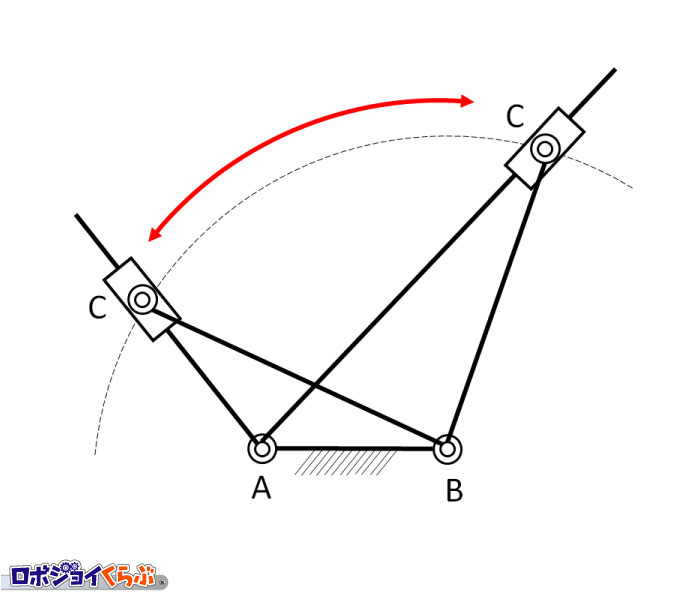
③揺動スライダ・クランク機構とは
リンクBCを固定し、Bを中心にリンクABが回転することでACが揺動運動を行います。
これは、車のワイパーや二足歩行ロボットに使われています。
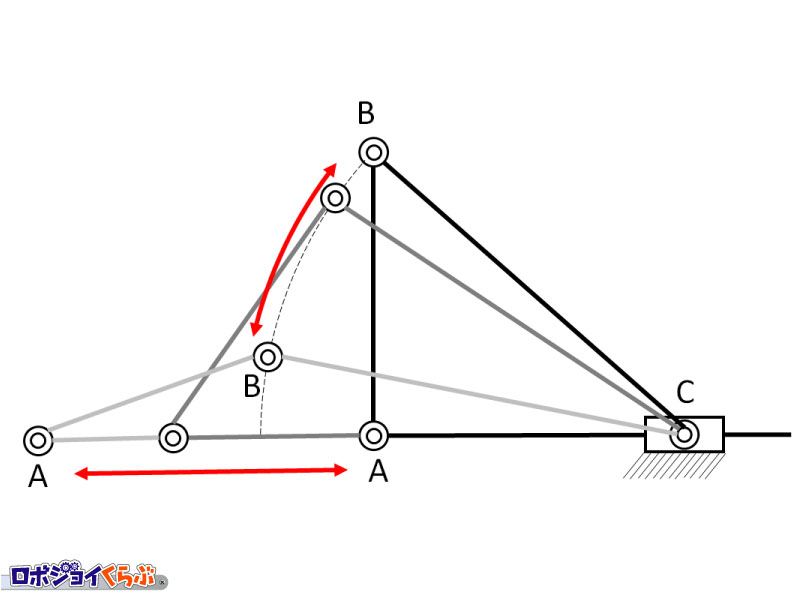
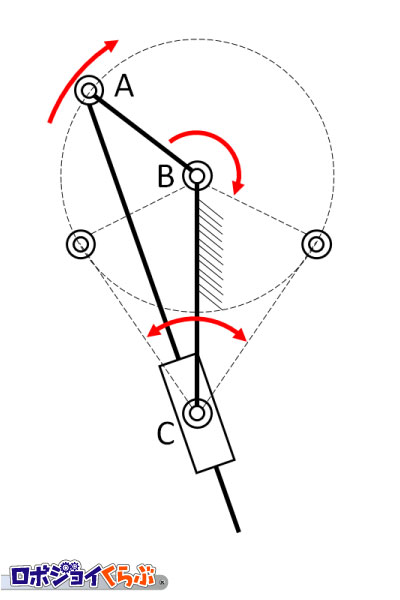
④固定スライダ・クランク機構とは
Cを固定することで、Aの往復運動をBの揺動運動に変えます。
これは、手動式汲み上げポンプに使われています。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。