





この連載では「教育版レゴマインドストームEV3」を使い、各種センサーをロボット競技に役立てるためのノウハウを紹介していきます。本当に役立てるためには実際に手足を動かすしかありませんので、これを参考に実践してみましょう。なお、使用するプログラミング環境は「教育版EV3ソフトウェア」です。
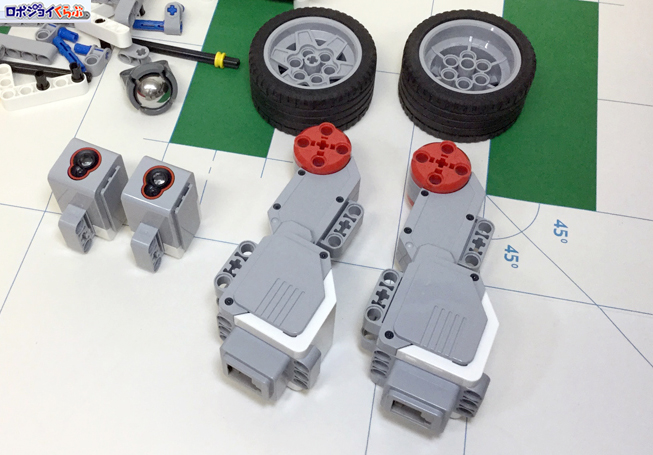
今回使用するのはEV3用の「カラーセンサー」です。
カラーセンサーには「色」「反射光の強さ」「周辺の光の強さ」という3種類のモードがあります。 今回は前回に引き続き「反射光」モードについて紹介します。反射光とはLEDを赤色に発光させて、対象物に当てて反射してきた光を測定するというモードのことです。
今回はカラーセンサーを2個使ってライントレースロボットを作ります。基本セットにはカラーセンサーは1個だけなので買い足さないといけないかもしれません。ライントレースはセンサーを1個使うよりも2個使ったほうが有利です。
・センサー2個の場合、途中で周辺の明るさが変わっても誤動作しません。センサー1個の場合だと誤動作します。
・センサー2個の場合、ラインが交差している場合、直進します。センサー1個の場合だと直進できません。
・センサー2個の場合、ラインが途切れた場合、直進します。センサー1個の場合だと直進できません。

こちらが出来上がったロボットです。Lモーターも2個使います。
入力ポート1:カラーセンサー右
入力ポート2:カラーセンサー左
出力ポートA:Lモーター右
出力ポートD:Lモーター左
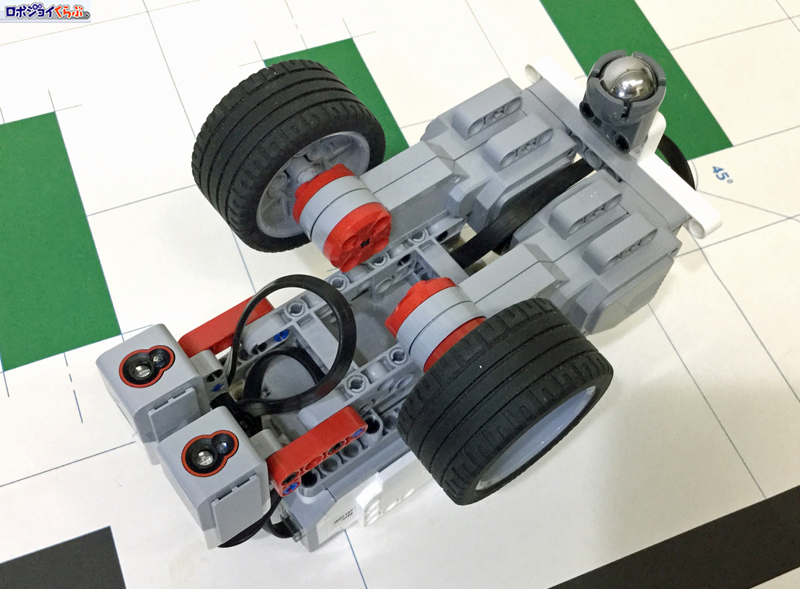
参考までにロボットの裏側です。 後側にはボールキャスターを使ってます。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。