





この連載では「教育版レゴ マインドストームEV3」を使い、各種センサーをロボット競技に役立てるためのノウハウを紹介していきます。本当に役立てるためには実際に手足を動かすしかありませんので、これを参考に実践してみましょう。なお、使用するプログラミング環境は「教育版EV3ソフトウェア」です。
◆回転センサーの仕組み

連載一回目の今回は「回転センサー」に着目してみましょう。
回転センサーというのは、LモーターやMモーターに内蔵されているセンサーです。センサーは直接見ることはできません。
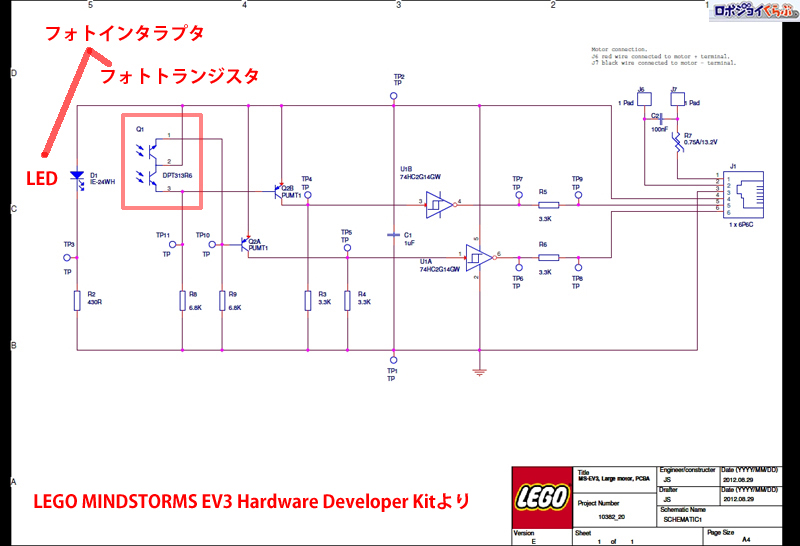
一般用EV3のダウンロードページ(http://www.lego.com/ja-jp/mindstorms/downloads)で公開されている「EV3 ハードウェア開発キット(LEGO MINDSTORMS EV3 Hardware Developer Kit=通称HDK)」を参照すると、回転センサーを回路図で確認することができます。
回路図の赤色の部分がフォトトランジスタです。これが回転センサーです。2つのセンサーで回転方向を判別しています。隣にあるLEDとセットで使います。推測ですが、LEDはセンサーには赤外線が使われていると思います。
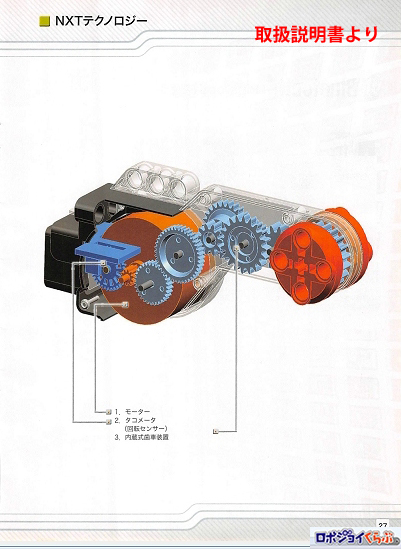
回転センサーの構造は「一般用レゴマインドストームNXT」の取扱説明書がヒントになります。これにはインテリジェントサーボモーターの内部構造が載っています。NXT用とEV3用では形状が若干違っていますが、電気的な仕様は同じなので、おそらくEV3用モーターも似た構造になっていると思われます。
この資料によると、スリットの入った円盤が回転することで回転センサーがON/OFFを繰り返します。この信号をソフトウェアが解読することで回転方向と回転角度、回転速度が分かります。
専門的にはこうした仕組みのセンサーのことを「ロータリーエンコーダー」と呼びます。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。