




◆つかんで移動
今までに作った3つのプログラム(手の開閉・方向転換・前進)をすべて組み合わせて、1つのプログラムにしてみました。
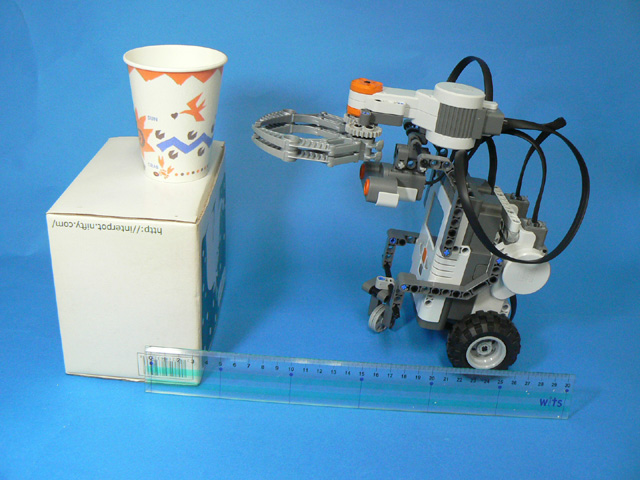
目標となる紙コップの10cm手前にロボットを配置します。そしてプログラムを実行します。
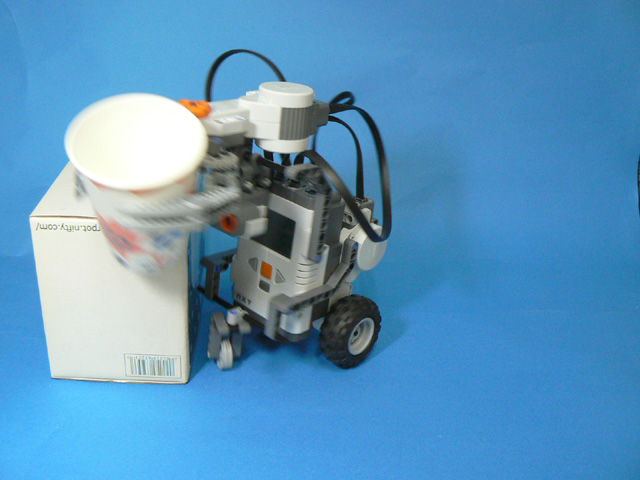
紙コップをつかんだら、90度の方向転換を2回行います。

進行方向が180度切り替わりました。

そして、10cmだけ前進します。プログラム終了です。
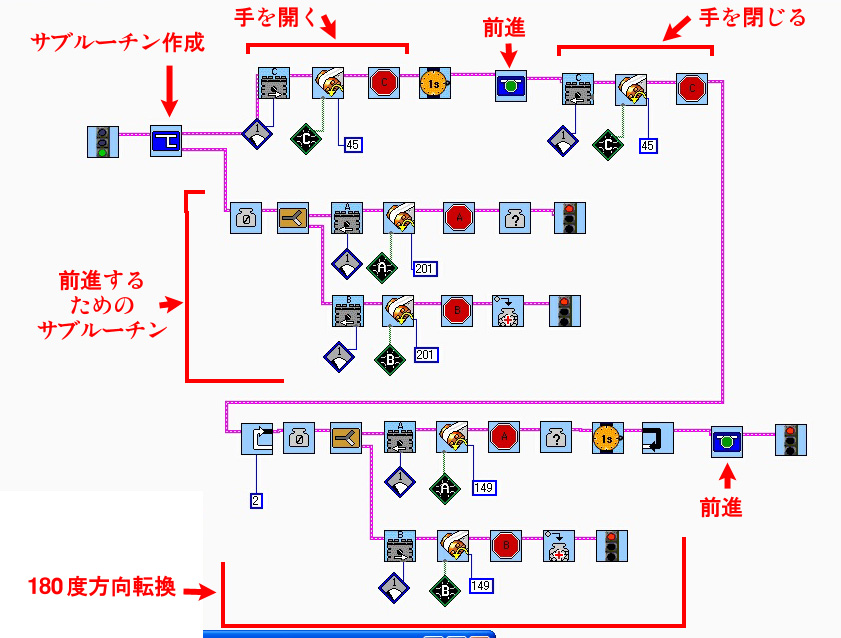
こちらが完成したプログラムです。やたらと長くなりました。
前進する処理は2回繰り返しますので、節約のため「サブルーチンをつくる」「サブルーチンを実行」を使っています。
[DOWNLOAD]作成したプログラム(Robolab2.9用)
[Movie]動いてるところのムービーです(音が入っていません。すみません)

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。