




◆直進
ロボットを10cm前進させてみたいと思います。モーターに必要な回転角度は次の式で計算できます。
360×10÷17.9=201.1…
…約201度。この角度で10cm進むはずです。
では、プログラムを実行させてみましょう。
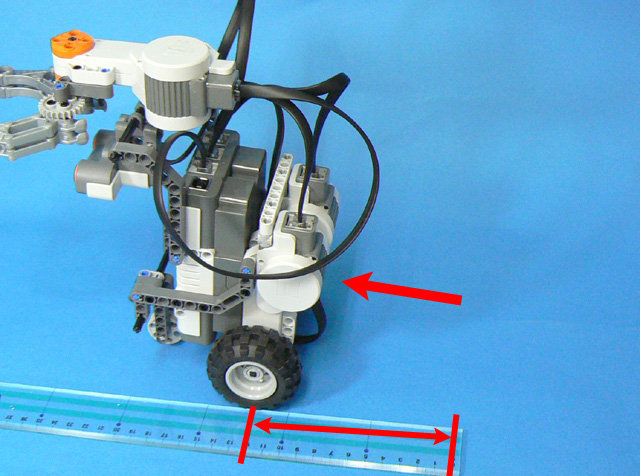
モーターの回転が止まりました。一応それらしく動きましたが…。
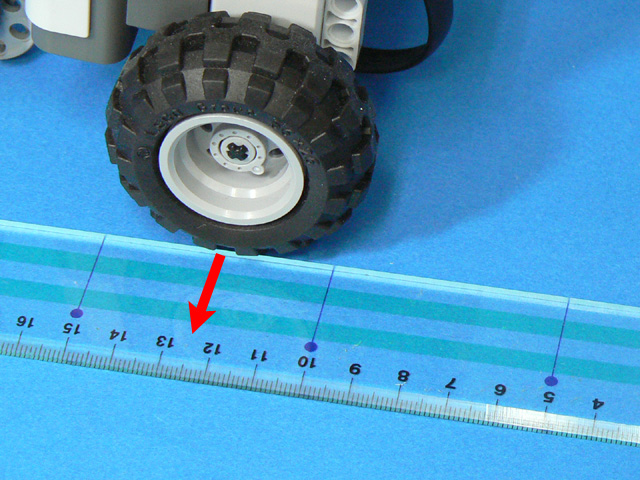
モものさしで計ると10cmのはずが、12.5cm進んでました。この原因はなんでしょうか。
おそらく、モーターを停止してから実際に止まるまでに動いてしまったぶんではないでしょうか。ここでは対策をせず、そのまま使います。
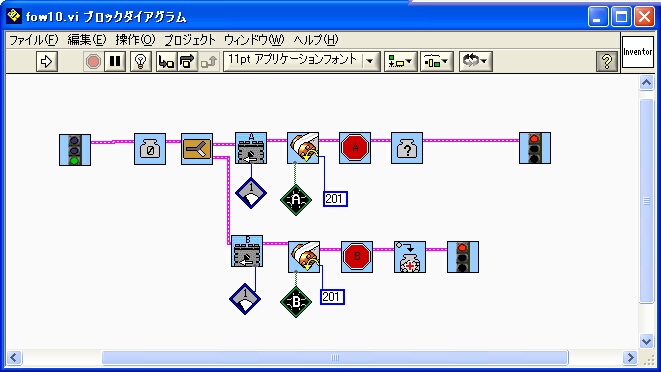
こちらが10cm(実際は12cm)前進するプログラムです。タスクを使って2つのモーターを監視しています。
[DOWNLOAD]作成したプログラム(Robolab2.9用)

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。