





ここでは、TETRIXを使ってロボット競技会に出場した、福井県立武生工業高校ロボット工学部の活動を通して、TETRIXの活用事例を紹介していきます。
前回までで船ロボットが完成しましたので、今回はプログラムと大会の様子を紹介します。
◆ロボット完成
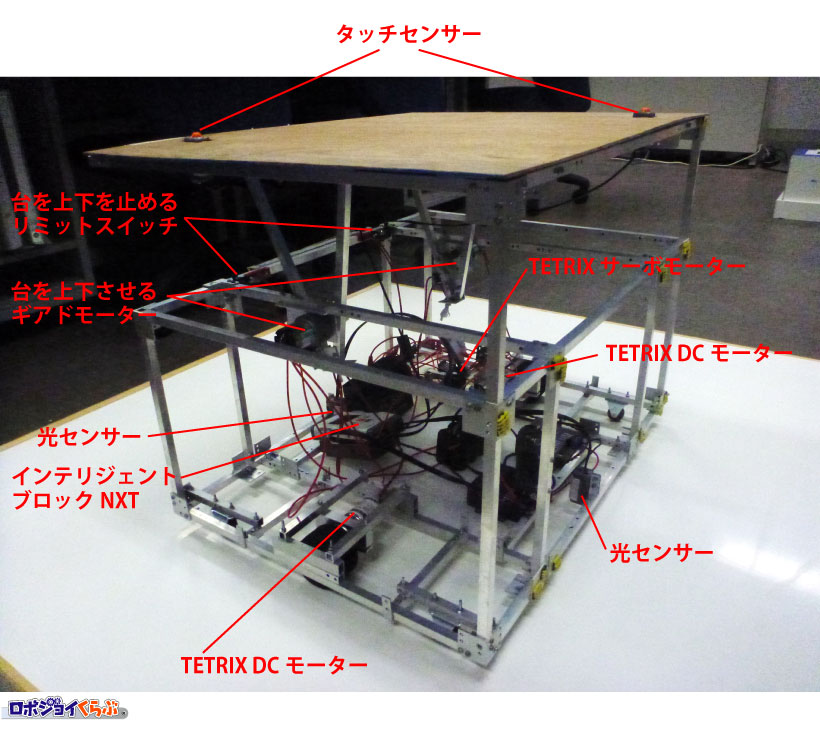
完成した船ロボットはこのようになりました。
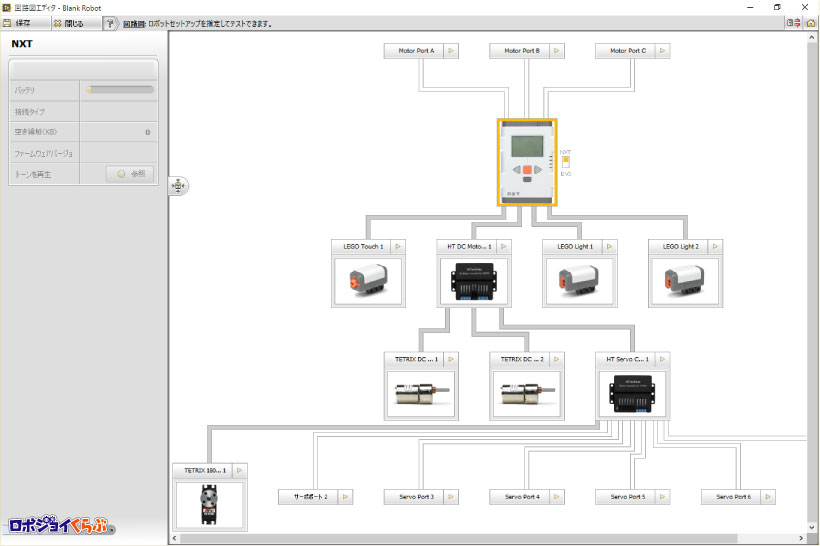
NXTの各センサーとTETRIXは左の図のようにつなぎました。
タッチセンサーは1つのポートで2つを制御しています。

リモコン型ロボットは左の図のようなものを使用しました。
船ロボットの上に乗ると、前の黒いタイヤを動かしているギアドモーターが船ロボットのタッチセンサーに当たって、台に乗ったことを検出させます。
まず、船ロボットに必要な機能のうち「4. 目的地に着いたら停止する機能」は、タイマーを使って移動時間を制御することにしました。
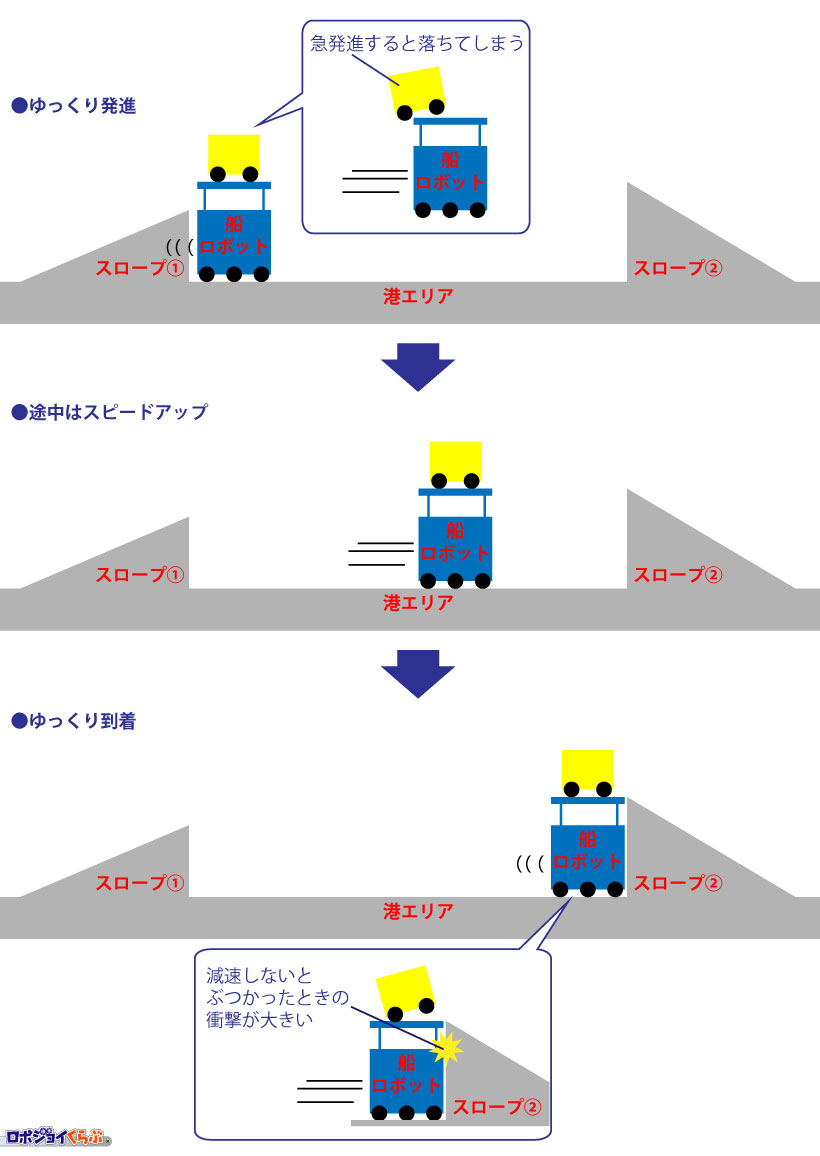
走り始めは、急発進するとリモコン型ロボットが台から落ちてしまうので、ゆっくり走り始め、途中はスピードを上げ、停止するときにまた減速するように、タイマーを使ってDCモーターのパワーを変化させるようにしました。
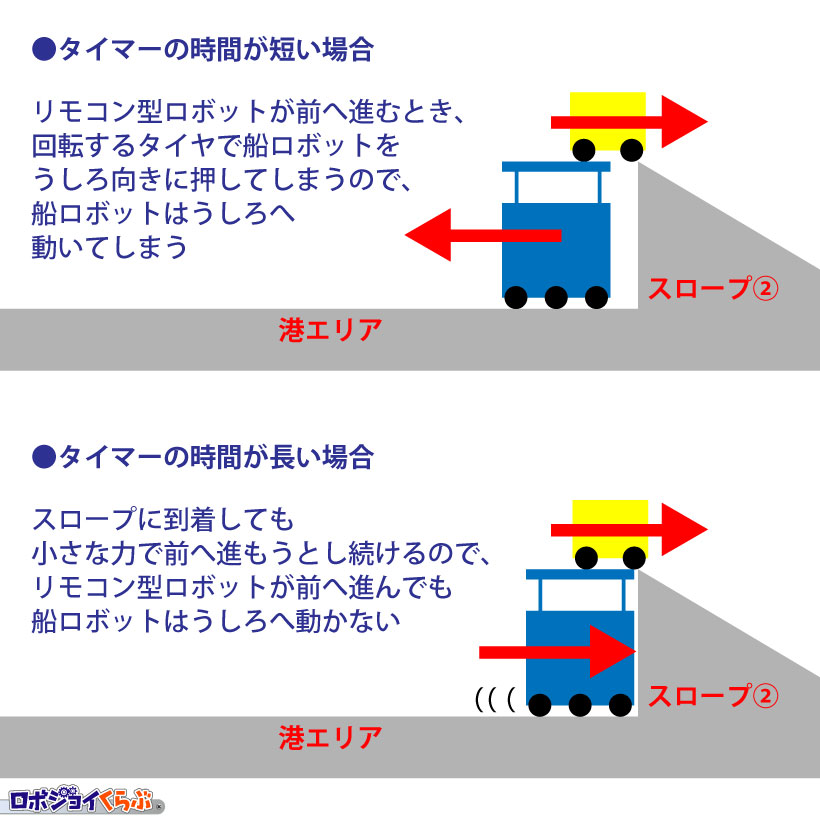
走行時間を長めに設定することで、リモコン型ロボットが船ロボットから降りるときに、船ロボットがうしろに下がってしまうことも防ぐことができました。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。