





- Page:
- 1
- 2
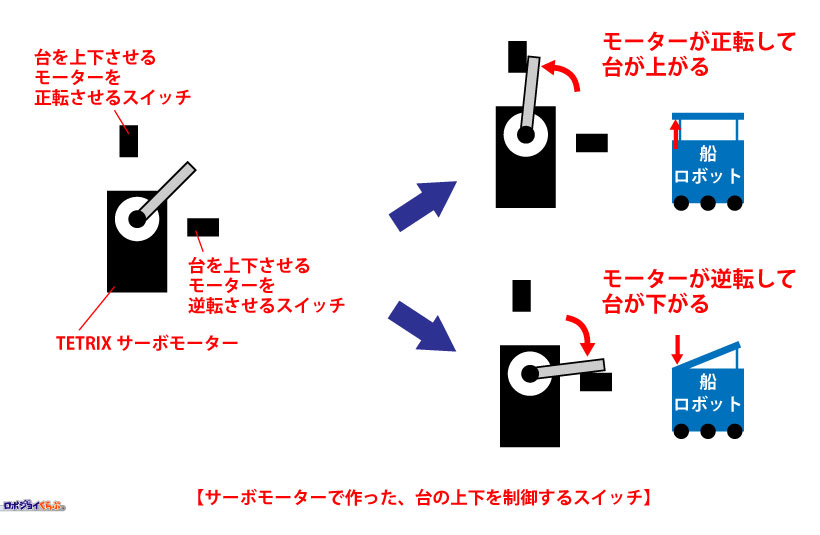
TETRIX 1セットにはDCモーターが2個含まれていますが、すでに車体部分で2個とも使用してしまっているため、台の上下の動きは普段使用しているTETRIXとは別のギアドモーターを、TETRIXのサーボモーターを使って制御することにしました。
サーボモーターの回転運動で、ギアドモーターの正転用リミットスイッチと逆転用リミットスイッチを押し、台の上下を制御します。
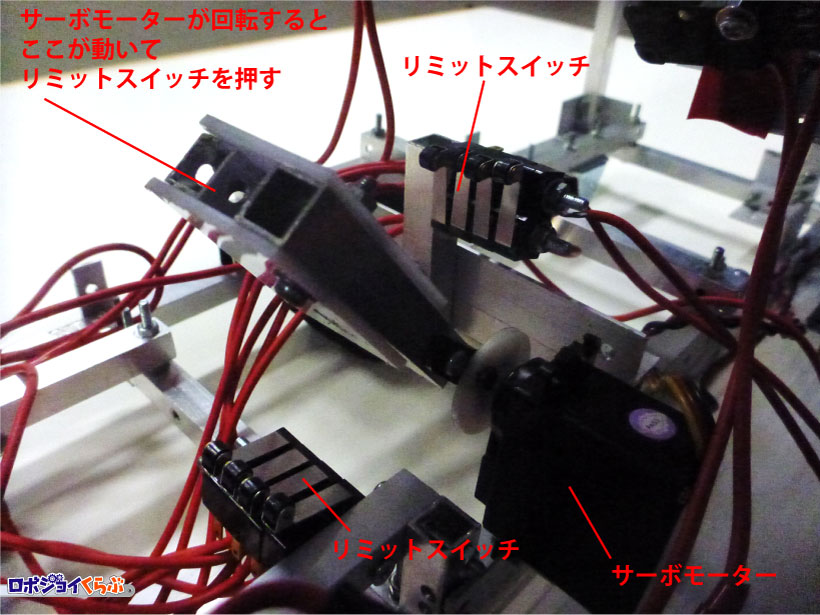
実際の装置はこのようになりました。
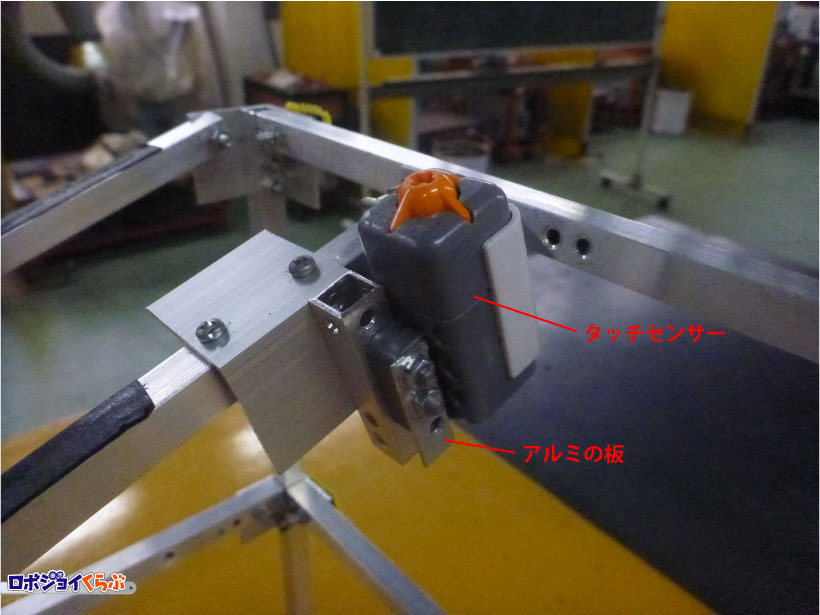
また、リモコン型ロボットが乗ったことを検出するためにNXTのタッチセンサーを利用しました。
こちらも光センサーと同様に、アルミの薄い板を間に挟んで取り付けました。
これは、センサーのプラスチック部分に直接ネジが当らないようにする役目もあります。
写真は、台の板を外した状態です。

タッチセンサーの部分に穴をあけた板を乗せ、リモコン型ロボットが台に乗るとタッチセンサーが押されるようにしました。
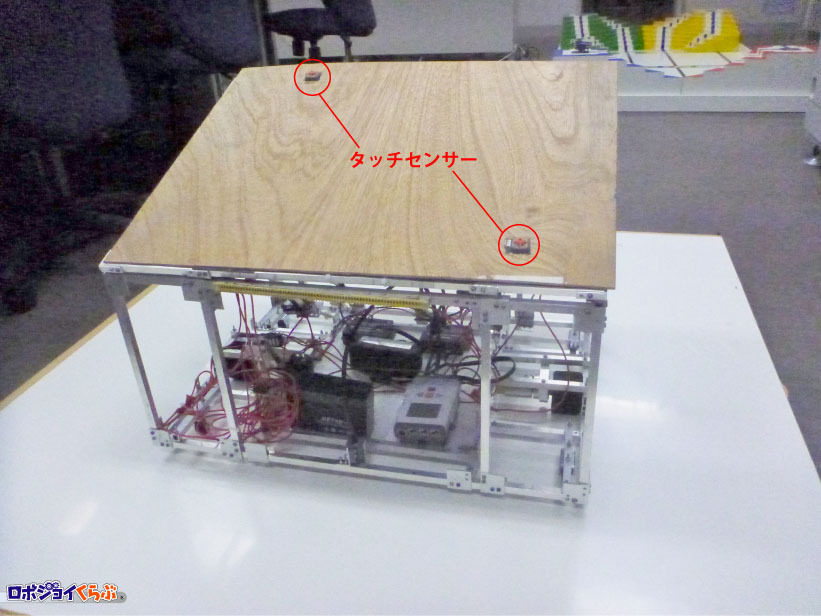
リモコン型ロボットは行き帰りで向きが変わるので、それぞれの検出ができるように、タッチセンサーは2個使用しました。
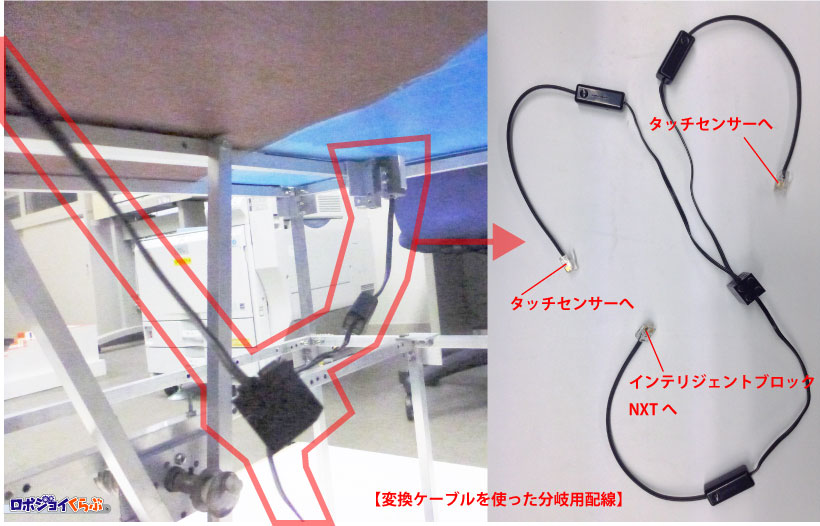
この時点でNXTのセンサーポートの空きが1つしか無かったため、NXTとRCXの変換ケーブルを使って分岐用の配線を作り、1つのポートでどちらのセンサーも検出できるようにしました。
写真は、実際に分岐して配線した様子と、変換ケーブルを使った分岐用配線です。
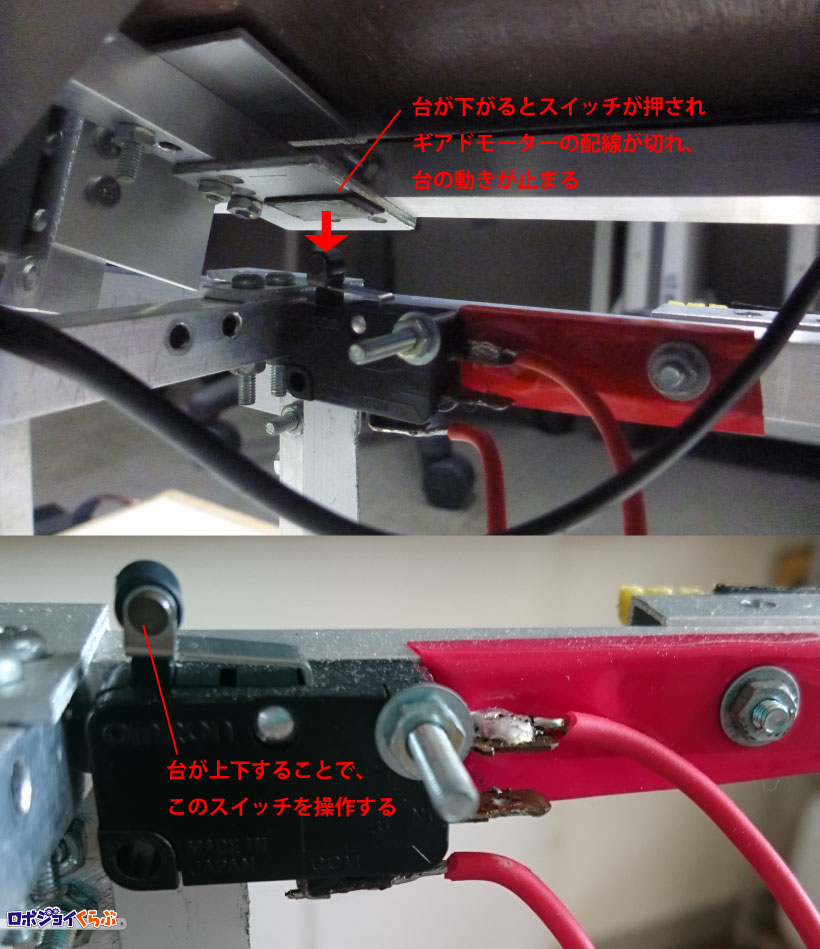
さらに、台の上下運動を止めるためにリミットスイッチを使用しました。
NXTのセンサーポートの空きがなく、リミットスイッチの信号をNXTに取り込むことが出来ないので、台を上下に動かしているギアドモーターの配線をリミットスイッチで切ったり繋いだりするようにしました。
このようにして、船ロボットに必要な機能の「(1) リモコン型ロボットが乗ったことをセンサーで感知して動作を開始する」機能と「(2) スロープ1とスロープ2の高さが違うので、リモコン型ロボットの乗る台の高さを調整する機能」を実現できるようにしました。
もう1つ必要な機能として「(4) 目的地に着いたら停止する機能」がありますが、本来はスロープに到達した事を検出するタッチセンサーを取り付けたかったのですが、NXTのセンサーポートに空きが無かったので、プログラムで対応することにしました。
これで船ロボットが完成しましたので、次回はプログラムについての説明と、大会の様子を紹介します。
- Page:
- 1
- 2


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。