





- Page:
- 1
- 2
ここでは、TETRIXを使ってロボット競技会に出場した、福井県立武生工業高校ロボット工学部の活動を通して、TETRIXの活用事例を紹介していきます。
前回は、船ロボットの車体部分の設計と製作について紹介しました。
今回は、船ロボットのリモコン型ロボットが乗る台のしくみを紹介します。
◆船ロボットに必要な機能
まずは、船ロボットに必要な機能についてもう一度確認します。
私達は、次のような機能が船ロボットに必要だと考えました。
(1) リモコン型ロボットが乗ったことをセンサーで感知して動作を開始する。
(2) スロープ①とスロープ②の高さが違うので、リモコン型ロボットの乗る台の高さを調整する機能。
(3) 壁にぶつからず走行する機能。
(4) 目的地に着いたら停止する機能。
このうち(3)については、前回紹介した車体部分で実現できるようにしました。
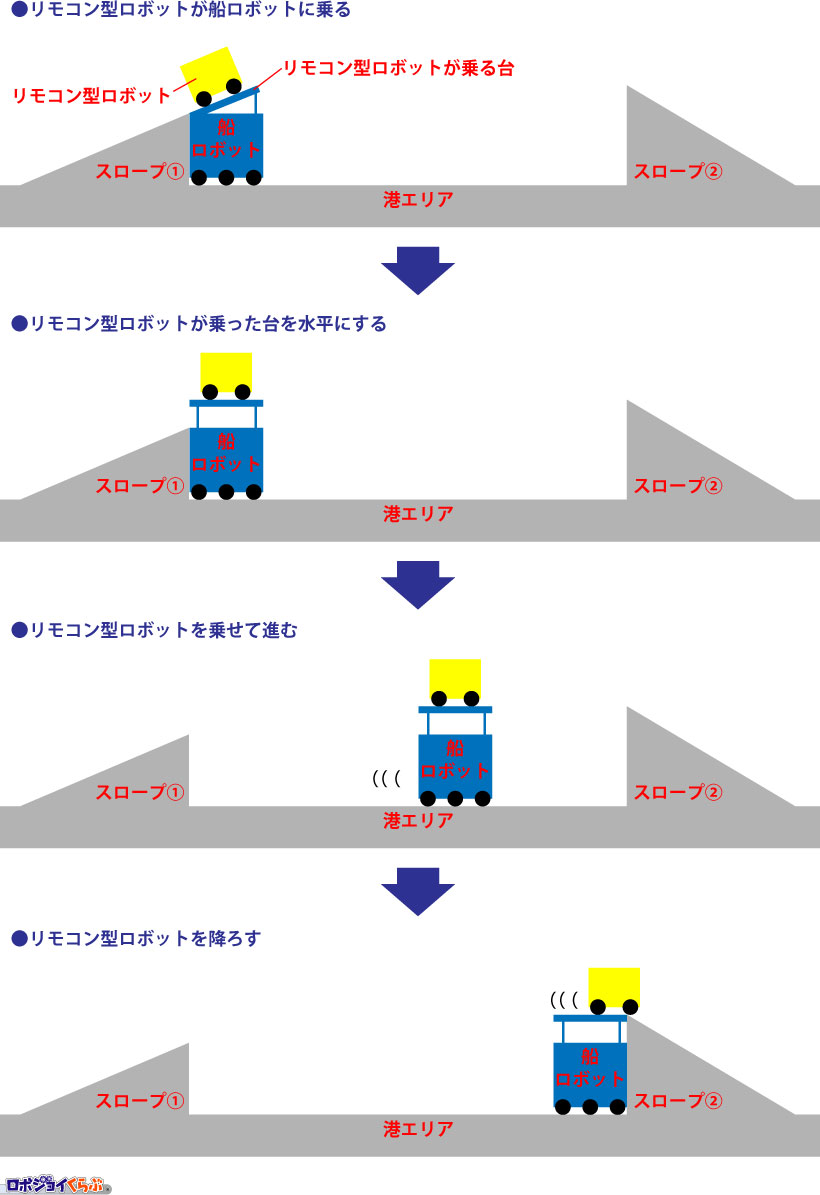
◆リモコン型ロボットが乗る台
この競技コースは、スロープ1とスロープ2の高さが違うので、下の図のように、リモコン型ロボットが乗る台はそれぞれの高さに合うように傾斜させておき、リモコン型ロボットが乗ったら水平に持ち上がるようにしました。
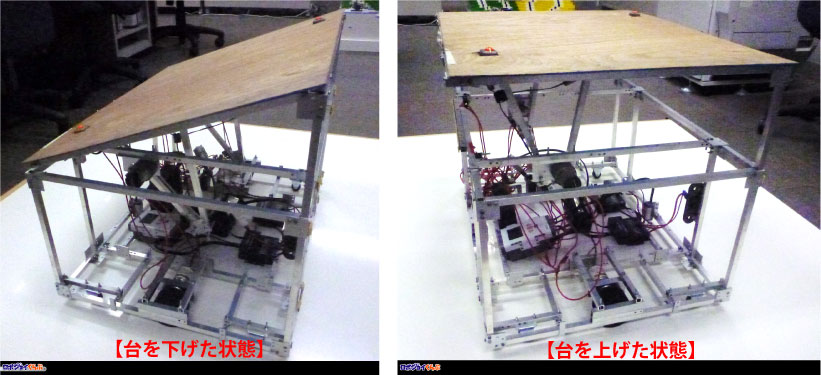
実際の車体は下の写真のようになりました。
- Page:
- 1
- 2


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。