





◆変数を導入する
ついでにプログラムの気になる部分を直したいと思います。
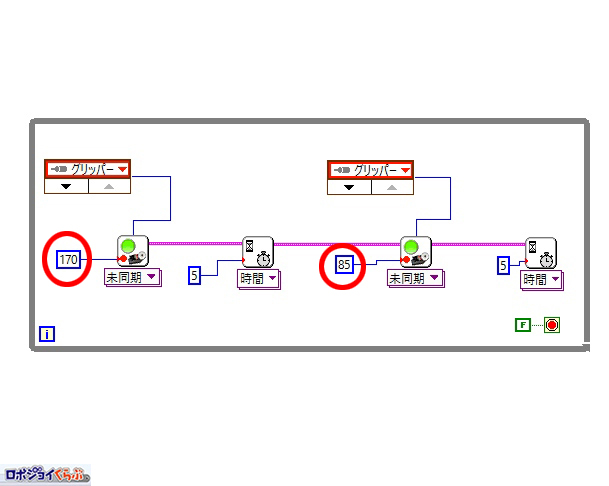
気になるのは数値を表現する部分です。写真は前回作ったグリッパーを開閉させる処理なのですが、パラメータだけが書かれていると、グリッパーが開いているか、閉じているのか分からなくなってしまいます。複雑なプログラムを作るには、数値ではない表現方法に変えないといけません。
そこで「変数」を使って分かりやすくします。実はこの連載で変数を使ったことがなくて、今回、初めて変数を使うことになります。
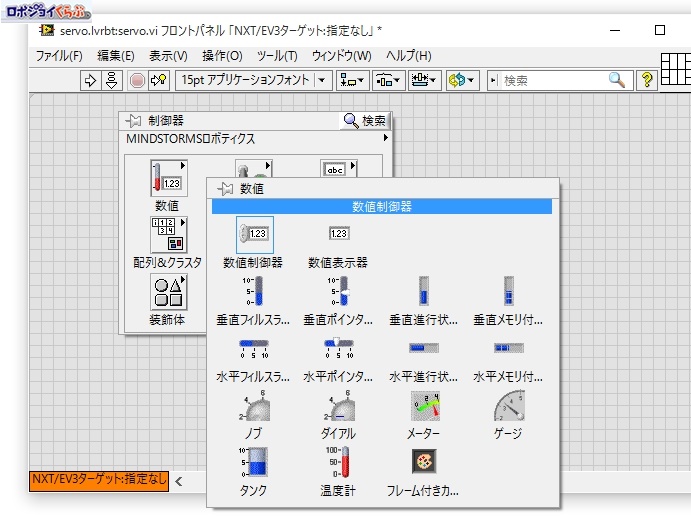
LabVIEWで変数を使うには、フロントパネルを操作する必要があります。EV3ソフトウェアの変数ブロックやROBOlabのコンテナとも違って、使い勝手がかけ離れていますが、LabVIEWでは変数を画面上の装置(制御器や表示器)として扱います。 変数はブロックダイアグラムのウインドウでは作ることができません。具体的な操作手順はフロントパネルに画面を切り替えてから、右クリックして、「数値→数値制御器」を選びます。
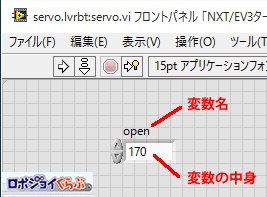
「数値」という名前の制御器が画面に表れますので、 この名前を変更します。これが変数名になります。 変数の値も入力できるのですが、画面を開き直すと0に戻ってしまいます。これを防ぐにはプログラム内で初期値を入れないといけません。
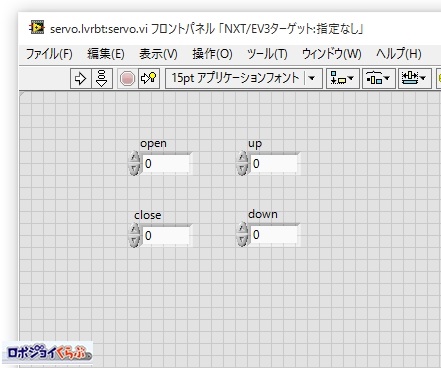
変数を4つ作ってみました。名前は「open」「close」「up」「down」です。 ここにサーボのパラメータを格納します。
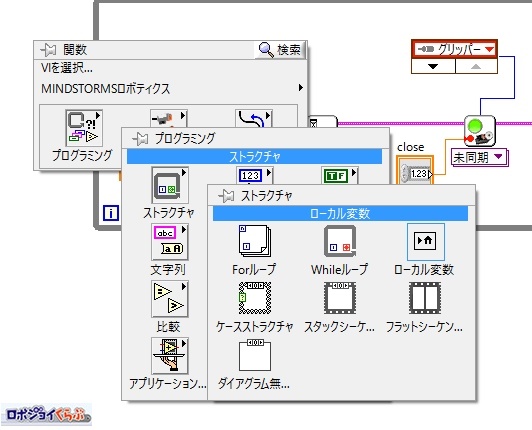
変数を読み込むにはブロックダイアグラムのウインドウに戻って、右クリックして、「プログラミング→ストラクチャ→ローカル変数」を選びます。ローカル変数というのは、このファイルの中だけで使う変数のことです。ローカル変数に対してグローバル変数というものも存在しますが、今回はローカル変数だけを使います。
ローカル変数は初めて作成すると名前が「?(選択なし)」になっています。これを右クリックして目的の変数を選択する必要があります。ここで「数値」と表示されていると意味が分からなくなってしまうので、事前に「open」や「close」に変更しておきました。
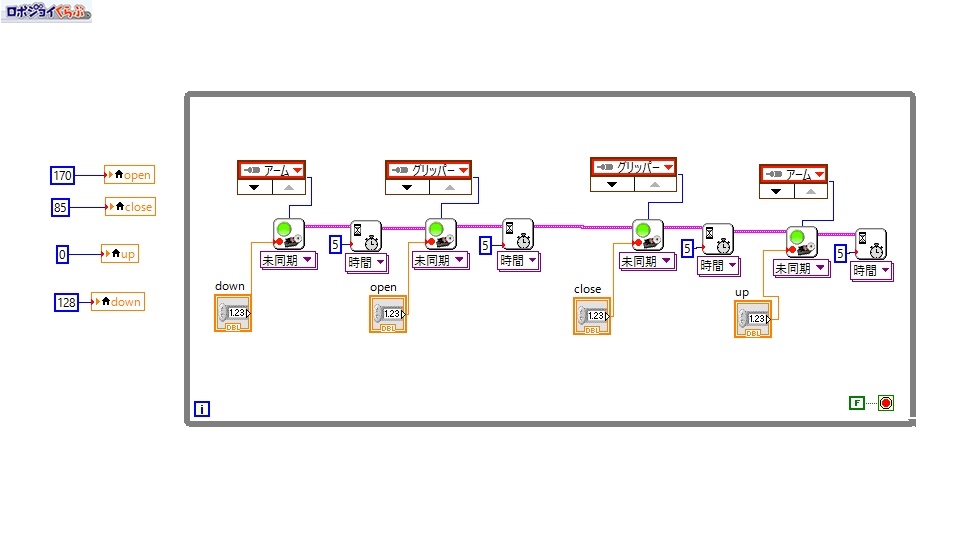
完成したプログラムがこちらです。
変数の「open」とか「close」とかがロボットの動きを表しています。少しはプログラムの内容が分かりやすくなったと思います。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。