





◆グリッパーの組み立て2
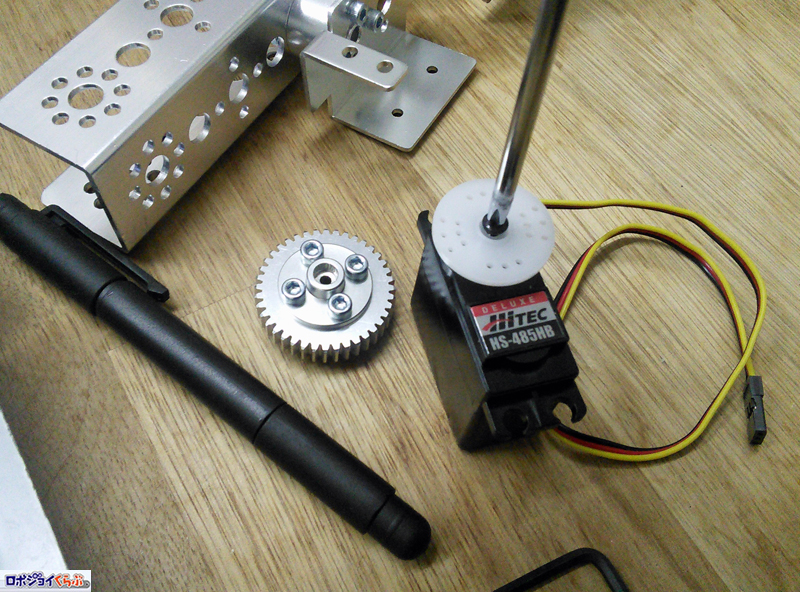
いきなり難所にさしかかりました。 ドライバーでねじを外して、サーボモータからサーボホーンを外すのですが、 セットに付属するマイナスドライバだと、うまくねじが回せません。そこで、プラスドライバを使いました。
ねじを回すと、その力でサーボホーンが回ってしまって回転位置が分からなくなってしまいます。 それを防ぐために、サーボホーンを手で押さえて、回らないようにしてねじを外しましょう。
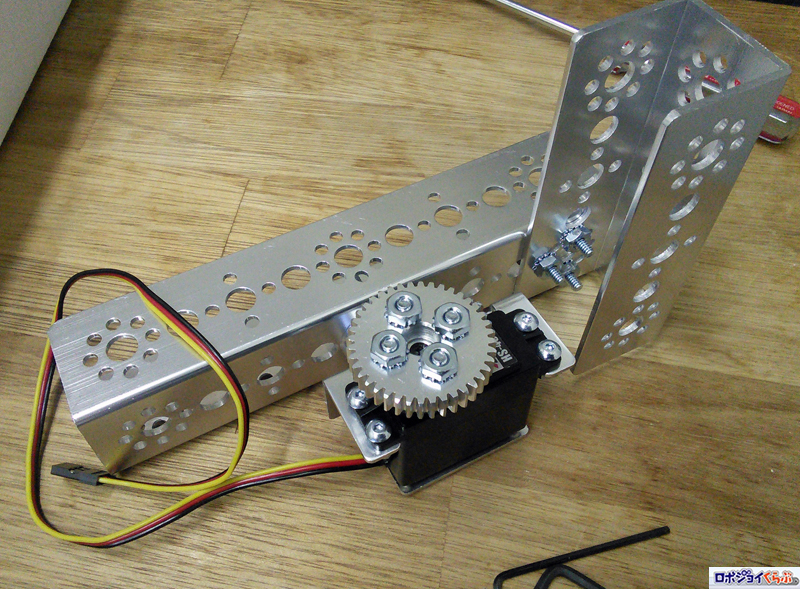
1つ目のサーボモータの取り付けが完了しました。 このサーボモータはアーム用として使います。
2つ目の難所がこちらです。
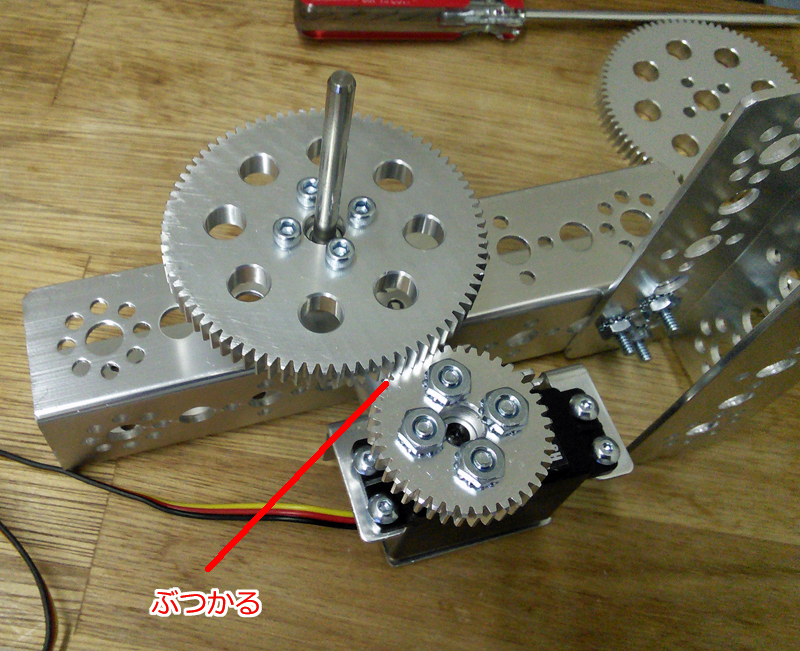
写真のような状態です。2つのギヤが噛み合いません。 どんなに力を入れてもギヤが噛み合いませんし、説明書を何度見比べても間違いは見つかりません。 ちょっとここで悩みました。
結局、周辺の部品のねじをゆるめてから、思い切り力を入れたらギヤが噛み合いました。
ねじの締め方によって、部品同士の位置がズレるようです。レゴマインドストームではお目にかからない経験でした。
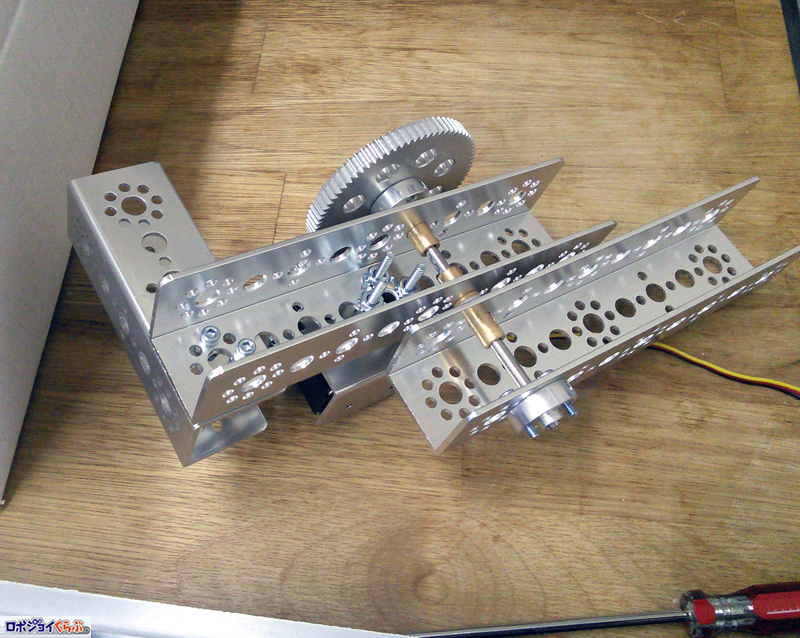
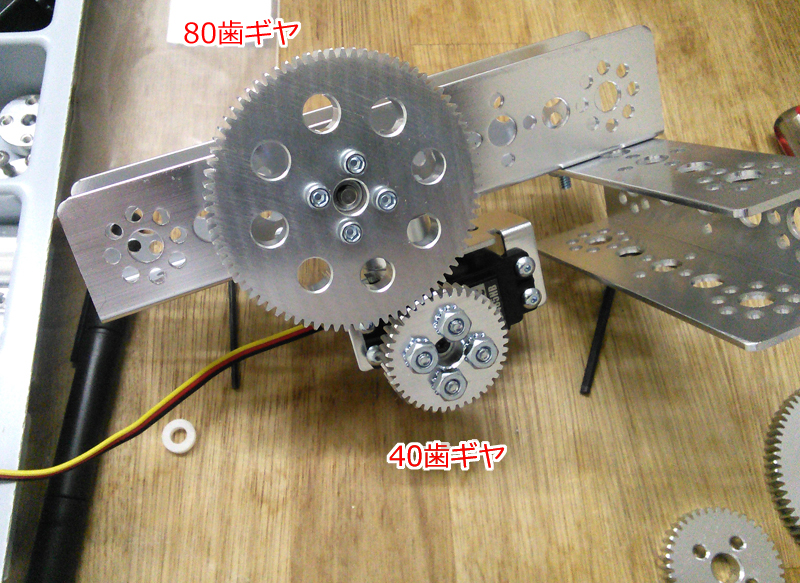
アームの先端を取り付けました。80歯と40歯の組み合わせですから、サーボモータの回転に対して、出力側の回転が半分になります。
ちなみに自分の場合、ねじを締め付け忘れていたらしく、持ち上げたとたんにアームの先端が落ちてしまいました。
ねじの締め付けが足りないと、簡単に部品が外れてしまいます。これもレゴマインドストームでは得られない経験です。
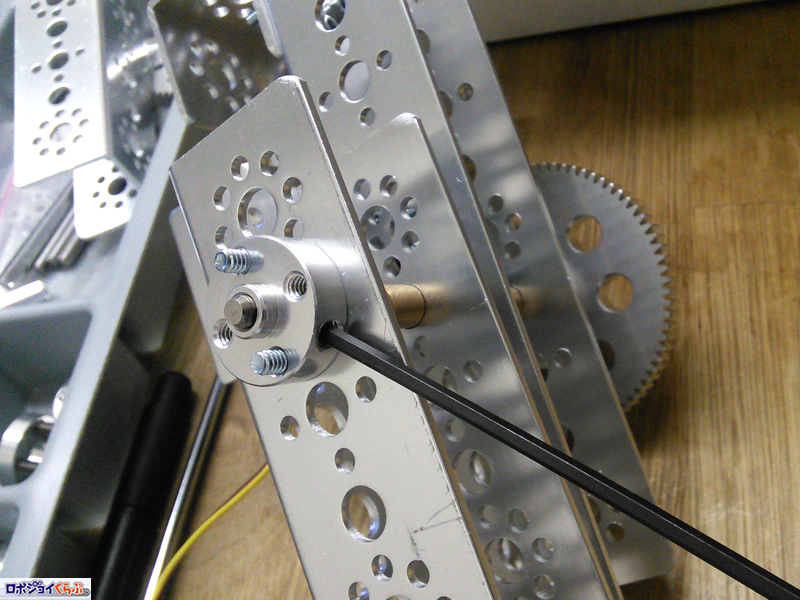
細い六角レンチを使ってボスを回して、シャフトを固定します。シャフトは平らな面にボスが当たるようにします。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。