





ここでは、「教育版レゴ マインドストームEV3」と「TETRIXアフレルベースセット」を使ってロボットを作る方法について紹介していきます。
◆センサーの取り付け
前回からの続きですが、「レンジャーボット(Ranger Bot)」を組み立てて、レッスン3に進んでみたいと思います。レッスン3では、センサーを取り付けます。
センサーの取り付け方法については説明書の「レッスン(Lessons)」→「レッスン3(Lesson3)」を参照しましょう。「BuildGuide.pdf」というPDFに手順が詳しく書かれています。
ただ、ここで問題があります。 説明書の中では「NXT」を使っていますが、ここでは「EV3」を使っていますので、部品が違います。そこで、センサーを次のように置き換えます。
・超音波センサー→EV3超音波センサー
・光センサー→EV3カラーセンサー
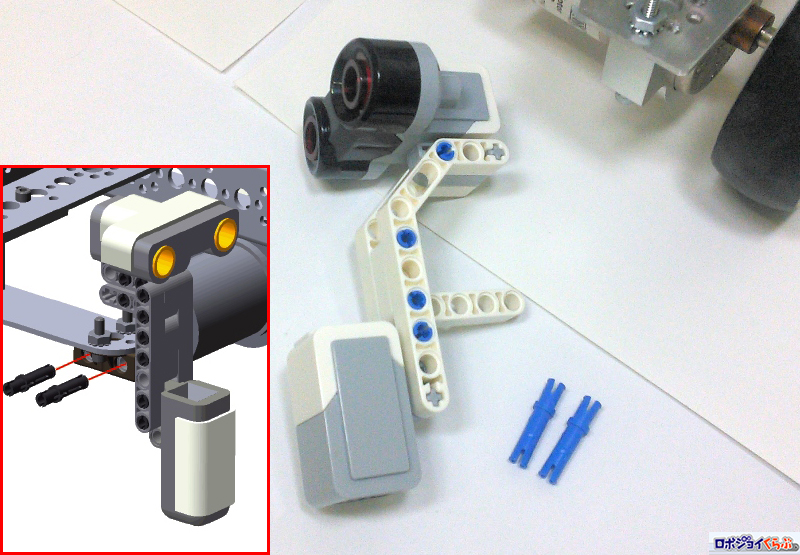
さらに、センサーを取り付けるために使う基本セットの部品も違いますので、説明書のとおりには作ることができません。そこで、写真のように部品をアレンジしています。参考にしてください。

「ハード・ポイント・コネクタ(TETRIX Hard Point Connector)」という部品を使って、センサー類をロボットに固定しました。
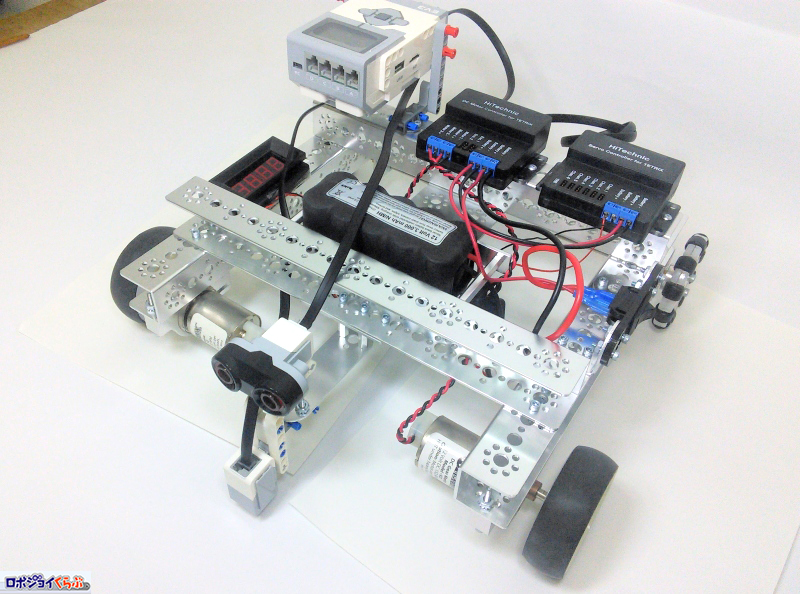
センサーとインテリジェントブロックEV3をケーブルでつないで、ハードウェアの完成です。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。