





◆カラーセンサの測定範囲
さらに、カラーセンサが色を検出している範囲を調べてみます。
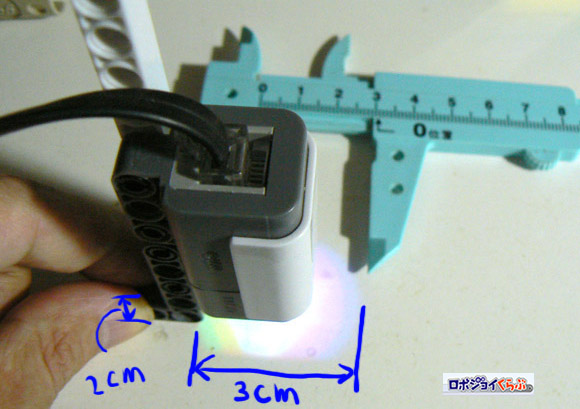
2cmほど床から浮かせた状態で、LEDの照らす範囲を物差しで測ります。赤・緑・青で位置が若干ズレてますが、およそ照らされる範囲は直径3cmのようです。
つまり、LEDの照らしている範囲は約70度ということになります。この範囲にピッタリと対象物が収まっていたほうが、LEDの光をセンサに伝えることができるわるわけです。センサの2cm手前を測定する場合、対象物のサイズは3cmくらい。対象物が小さかったり、センサから離れていると、色を正しく検出できないわけです。
以上をまとまめると、ブロック1個ぶんのサイズの色を検出したいという場合には、対象物をセンサの1cmくらい手前に近づけたほうがよさそうです。そして、センサの周りはできるだけ遮光して、外部からの光が入らないようにしたほうがいいみたいです。
◆カラーセンサの実行速度
最後に、カラーセンサで検出するさいにかかる時間を測ってみたいと思います。なぜ時間を測るのかというと、ロボット競技でセンサを使うさいにはスピードが命だからです。
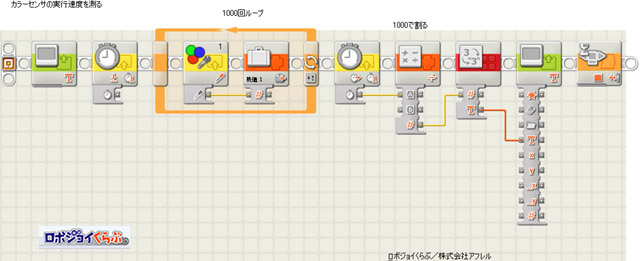
作成したプログラムです(Program-3.rbt)。ループブロックを使って、1000回ほど実行させて、最後にタイマの時間を1000で割っています。これによって、ループ1回ぶんの時間が求まるはずです。
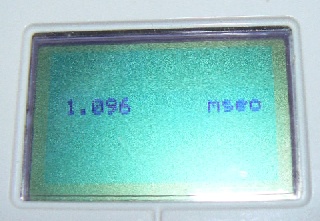
実行すると、LCDには「1.096 msec(単位はミリ秒)」と表示されました。これが1回あたりの測定時間です。
1000÷1.096=912.40…、つまり、「1秒間に912回測定できる」ということになります。
これによって、カラーセンサは超音波センサにくらべて何倍も高速だということが分かりました。
今回はカラーセンサの基本的な性能について紹介しました。次回には、ロボット作りにおいての活用方法について具体的に紹介します。
[DOWNLOAD]今回作成したプログラム(教育用レゴマインドストームNXT2.0以上推奨)


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。