





◆データロギング機能をロボット作りに活用する
教育用NXTソフトウェアのバージョン「2.0」から「データロギング」という機能が加わりました。データロギングとは情報(データ)を集めることで、この集めた情報のことを「ログ」と呼びます。そして、ここでのログとは、パソコンに集めたNXTに関する情報(センサの値など)のことを意味します。データロギング機能はリテール版のNXTソフトウェアや、それ2.0未満のバージョンには搭載されていないのでご注意ください。
なお、データロギングには、USBケーブルを挿したまま行う方法(リアルタイム測定)と、USBケーブルを切り離して行う方法(リモート測定)の2種類があります。ここでは、ロボットという特徴を活かし、USBケーブルを切り離してロギングを行ってみたいと思います。(文/松原拓也)
◆まずはロボット作り
NXTソフトウェア内の「ロボットエデュケーター」に登録されている「モバイルカラー識別」というロボットを真似て作ってみます。
部品数の少ないシンプルなロボットです。
このロボットの作り方は「モバイルカラー識別」の中で詳しく紹介されています。それを参考に組み立ててください。

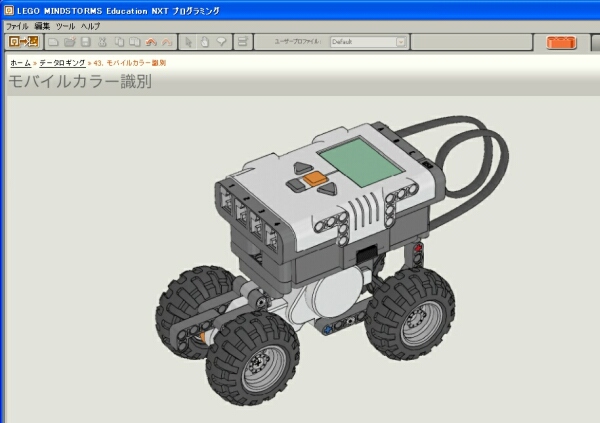
ロボットが完成すると写真のようになります。出力ポートAにはモータをつなぎ、入力ポート3には光センサをつなぎます。
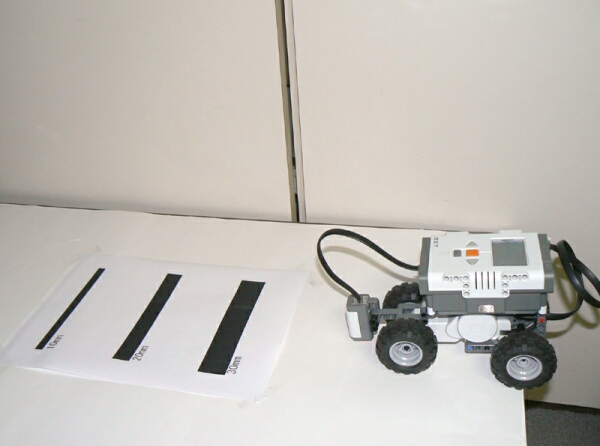
今回は「光センサがどう反応するか」を知りたいので、床面に黒い線を並べてみました。

A4サイズの紙に3本のラインを印刷して、床にセロハンテープで貼りつけてみました(印刷用のPDFファイルはこちら) 。
線の太さは10mm、20mm、30mmの3種類です。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。