





この連載では「教育版レゴ マインドストームEV3 基本セット」を使ったライントレースロボットの作り方を紹介していきたいと思います。ライントレースロボットはその名のとおり「線(ライン)を追跡(トレース)」するロボットのことです。
◆ライントレースロボットとは

ライントレースロボットを作りましょう。次のように接続します。
・EV3カラーセンサーをポート1に接続。
・右モーターをポートAに接続。
・左モーターをポートDに接続。
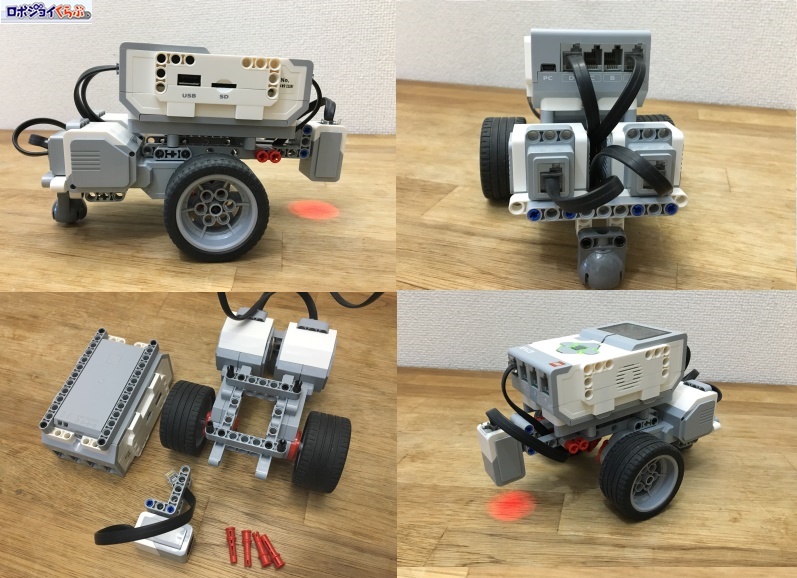
ロボットのうしろにはボールキャスターを取り付けます。
ロボットの先端にEV3カラーセンサーを下向きに取り付けます。EV3カラーセンサーと床面との距離は1~2cmにします。
なお、ロボットの形状はこれがベストというわけではなく、まだまだ改良の余地があります。今回は完成度を後回しにして、構造のシンプルさを優先させました。
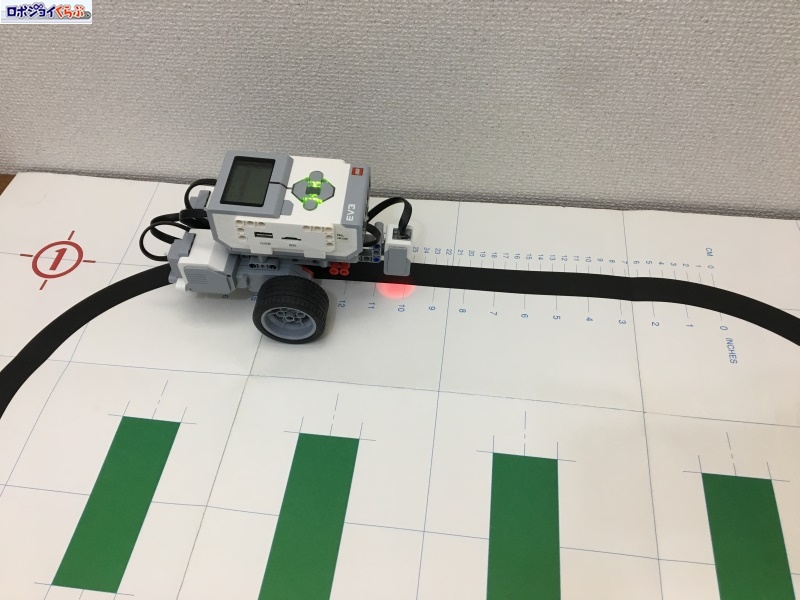
続いてコースを用意します。筆者の場合は、RISのVer.1.5に付属していたコースを使っています。かなり古いです。
今ならほぼ同一の形状をしている「楕円コース」がアフレルで売られています。価格が手ごろですので、そちらがおすすめです。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。