





◆HiTechnic製カラーセンサー
続いて、カラーセンサーをレゴ社純正からHiTechnic製に交換してみました。プログラムのブロックを数個交換するだけで対応させることができます。
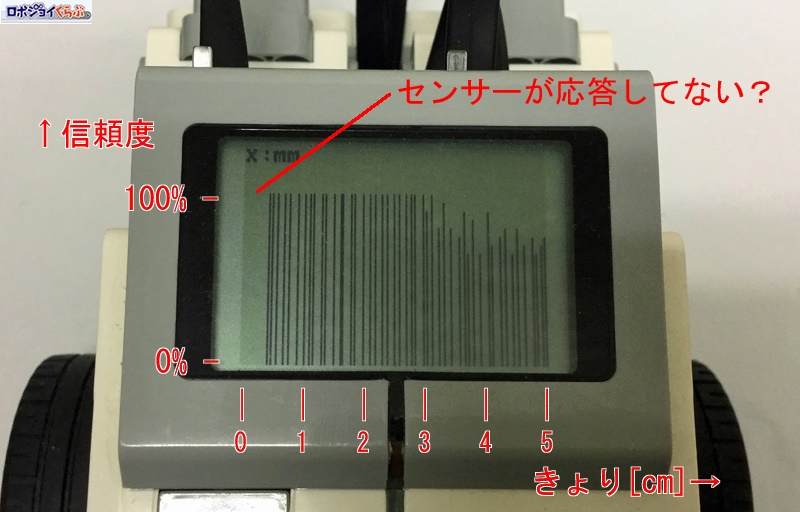
プログラムの実行結果がこちらです。 センサーは5cm以上離れていても色を読み取ることができます。ただし、センサーが遠ざかると信頼度が少しずつ落ちていきます。7.5cmくらいで信頼度が0になります。 ちょっと気になるのは最初の0~0.4cmくらいまでグラフが空白になっていることです。0%でも100%でもなく空白なので、プログラムのブロックが応答していない状態と思われます。この現象は2回目以降の実行では発生しません。インテリジェントブロックの電源を入れたら最初に慣らし運転をしたほうがよさそうです。 あとは、グラフのすき間が気になります。EV3カラーセンサーの場合よりも応答が遅いです。これはインテリジェントブロックとの通信方法にI2Cを使っていて、通信に時間がかかってしまうためです。
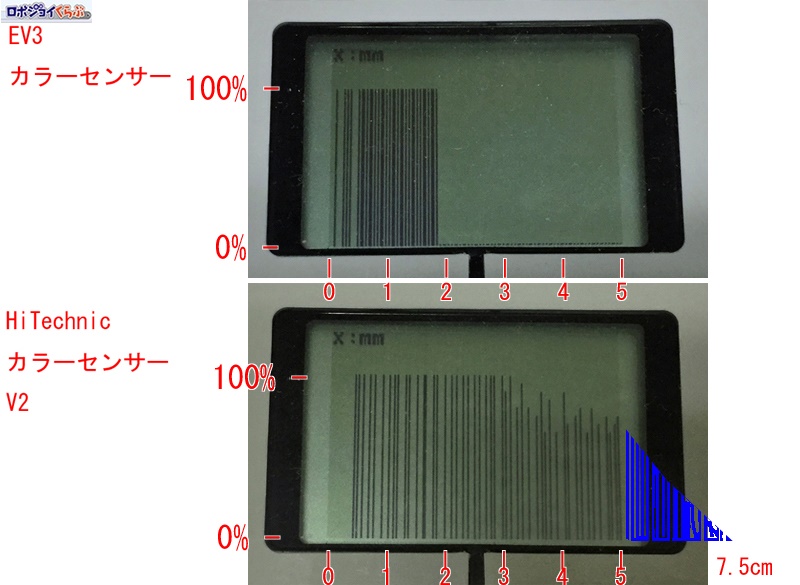
2つのセンサーの結果を並べてみました。センサーの特性がまったく違っていることが分かります。
最後にカラーセンサーの色モードについて分かったことをまとめてみました。
≪EV3カラーセンサー≫
・プログラムの応答が早い。
・測定範囲:0~1.8cm(1.8cm以上離れると信頼度が一気に落ちる)
・慣らし運転は不要
・測定結果が周辺の光で影響しない
≪HiTechnic製カラーセンサーV2≫
・プログラムの応答が遅い。
・測定範囲:0~6cm(3cm以上離れると信頼度が少しずつ落ちていく)
・慣らし運転は必要
・測定結果が周辺の光で影響する


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。