





この連載では「教育版レゴマインドストームEV3」を使い、各種センサーをロボット競技に役立てるためのノウハウを紹介していきます。本当に役立てるためのには実際に手足を動かすしかありませんので、これを参考に実践してみましょう。なお、使用するプログラミング環境は「教育版EV3ソフトウェア」です。
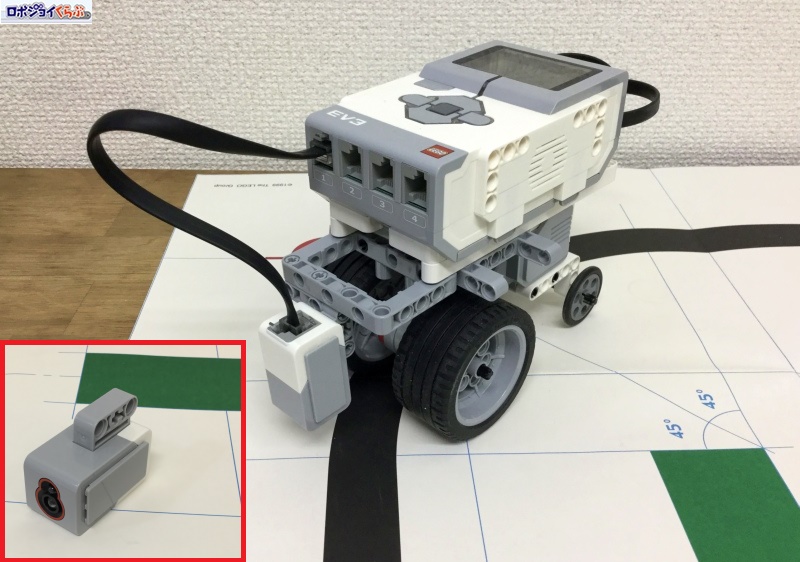
今回使用するのはEV3用の「カラーセンサー」です。
カラーセンサーには「色」「反射光の強さ」「周辺の光の強さ」という3種類のモードがあります。全部を取り上げるとボリュームがありすぎるので、今回は「反射光」について紹介します。反射光とはLEDを赤色に発光させて、対象物に当てて反射してきた光を測定するというモードのことです。
用意するものは前回と同じモーター1個を使ったロボットです。センサー部分だけ交換します。入力ポート1にカラーセンサーを接続します。
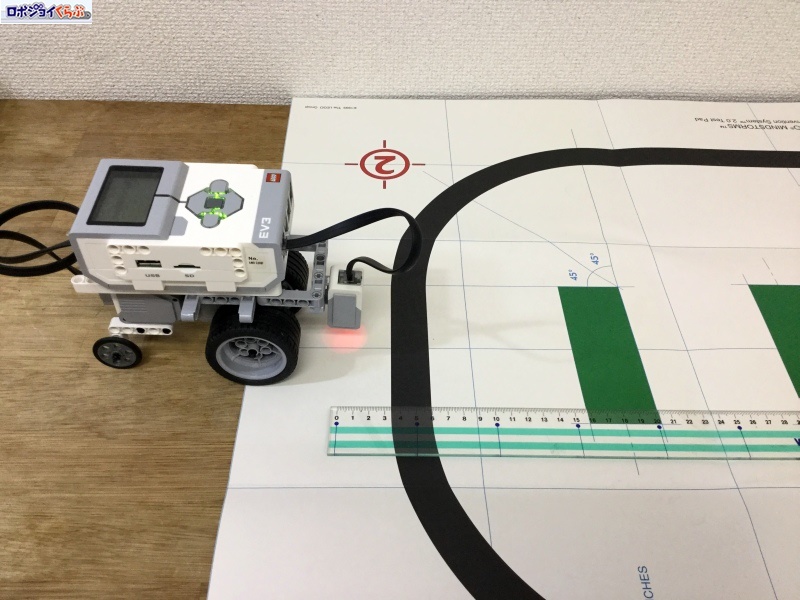
実験用のフィールドを用意します。幅25mm(2.5cm)の黒いラインが描かれたコースです。
さらに今回は競技っぽくするために「お題」を用意します。お題は「ラインの真上にカラーセンサーがある位置でロボットを停止させる」ことです。チャレンジしてみましょう。
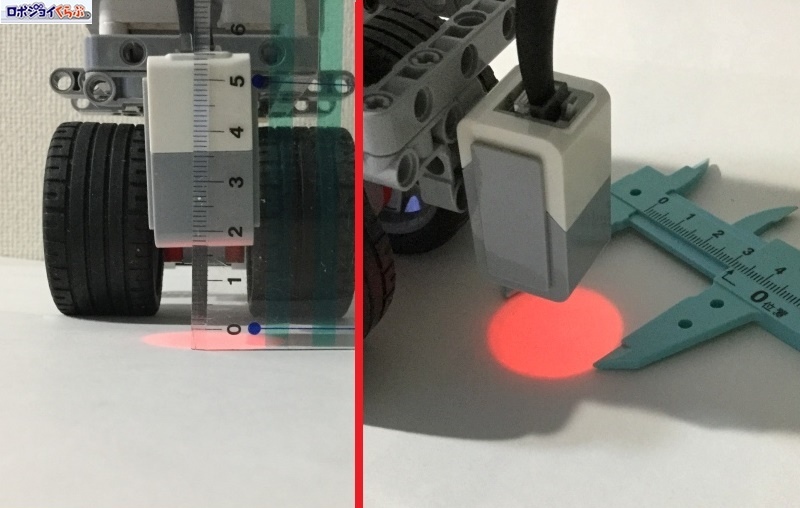
最初にカラーセンサーの特性を確認しましょう。
このロボットの場合、カラーセンサーの先端から地面までの距離は4+17=約21mmです。床面に直径32mmのライトの光が当たっています。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。